-
1 communications standard
English-Russian dictionary of modern telecommunications > communications standard
-
2 communications standard
English-Russian dictionary of Information technology > communications standard
-
3 communications standard
Телекоммуникации: стандарт в области связиУниверсальный англо-русский словарь > communications standard
-
4 TACS
Total Access Communications Systemсистема связи со всеобщим доступом; стандарт в области аналоговой телефонии, широко распространенный в Европеобщедоступная система связи (стандарт сотовой связи на частоте 900 МГц, распространен в Великобритании).The glossary of terms and concepts of mobile communication > TACS
-
5 ETSI
- поверхностная акустическая волна
- Европейский институт телекоммуникационных стандартов
- Европейский институт стандартов по коммуникациям
- Европейский институт стандартизации электросвязи
- Европейский институт стандартизации по электросвязи
- Европейский институт по стандартизации в области электросвязи
Европейский институт по стандартизации в области электросвязи
—
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
Европейский институт стандартизации по электросвязи
Организация ETSI учреждена собранием директоров CEPT 14 января 1988 г. Основу ее деятельности составляет разработка телекоммуникационных стандартов (МСЭ-Т Н.610).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
Европейский институт стандартизации электросвязи
—
[Л.Г.Суменко. Англо-русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.]Тематики
EN
Европейский институт стандартов по коммуникациям
ETSI
—
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]Тематики
Синонимы
EN
Европейский институт телекоммуникационных стандартов
Европейский институт телекоммуникационных стандартов, создан в 1988 г. Основу его деятельности составляет разработка стандартов в области связи.
ETSI официально признан Еврокомиссией и отвечает за стандартизацию информационных и телекоммуникационных технологий (ICT) в Европе - сюда включаются телекоммуникации, вещание, а также смежные области, вроде интеллектуальных транспортных систем и медицинской электроники.
ETSI объединяет 655 членов из 59 стран как внутри, так и за пределами Европы.
ETSI играет важную роль в разработке широкого спектра стандартов и технической документации. При участии ETSI, в частности, разрабатывались стандарты для вещания: DRM, DAB, DVB.
[ http://www.morepc.ru/dict/]Тематики
EN
06.04.13 поверхностная акустическая волна [ surface acoustic wave; SAW]: Электроакустический эффект, используемый в системах автоматической идентификации, когда микроволновые радиосигналы малой мощности с помощью пьезоэлектрического кристалла в радиочастотной метке преобразуются в ультразвуковые поверхностные акустические волны.
Примечание - Информация об уникальной идентификации содержится в фазово-временных вариациях отраженного радиочастотной меткой сигнала.
<2>4 Сокращения
ARQ
Автоматический запрос повтора [Automatic Repeat Request]
ASK
Амплитудная манипуляция [Amplitude Shift Keying]
BPSK
Бинарная фазовая манипуляция [Binary Phase Shift Keying]
CDMA
Множественный доступ с кодовым разделением каналов [Code Division Multiple Access]
CSMA
Множественный доступ с анализом состояния канала передачи данных [Carrier Sense Multiple Access]
CSMA/CD
Множественный доступ с анализом состояния канала передачи данных и обнаружением конфликтов [Carrier Sense Multiple Access with Collision Detection]
DBPSK
Дифференциальная бинарная фазовая манипуляция [Differential binary phase shift keying]
DSSS
Широкополосная модуляция с непосредственной передачей псевдослучайной последовательности [Direct sequence spread spectrum modulation]
EIRP (ЭИИМ)
Эквивалентная изотропно-излучаемая мощность [Equivalent Isotropically Radiated Power]
EMI
Электромагнитная помеха [ElectroMagnetic Interference]
ETR
Технический отчет ETSI [European Telecommunications Report]
ETS
Телекоммуникационный стандарт ETSI [European Telecommunications Standard]
ETSI
Европейский институт по стандартизации в области телекоммуникаций [European Telecommunications Standards Institute]
FHSS
Широкополосная модуляция с дискретной перестройкой несущей частоты [Frequency Hopping Spread Spectrum]
FSK
Частотная манипуляция [Frequency Shift Keying]
GHz (ГГц)
Гигагерц [Gigahertz]
GMSK
Минимальная гауссовская манипуляция [Gaussian Minimum Shift Keying]
kHz (кГц)
Килогерц [Kilohertz]
MSK
Минимальнофазовая частотная манипуляция [Minimum shift keying]
MHz (МГц)
Мегагерц [Megahertz]
OBE
Навесное оборудование [On-Board Equipment]
PDM
Модуляция импульса по длительности, широтно-импульсная модуляция [Pulse Duration Modulation]
PM
Фазовая модуляция [Phase modulation]
PPM (ФИМ)
Фазоимпульсная модуляция [Modulation (pulse position)]
PSK
Фазовая манипуляция [Phase Shift Keying]
PWM
Широтно-импульсная модуляция [Pulse Width Modulation]
RF/DC
Обмен данными системы радиочастотной идентификации [Radio frequency data communication]
RFI
Радиопомеха [Radio frequency interference]
RSSI
Индикатор уровня принимаемого сигнала [Receiving Signal Strength Indicator]
S/N
Отношение сигнала к шуму [Signal/noise ratio]
SAW
Поверхностная акустическая волна [Surface Acoustic Wave]
SIN AD
Отношение сигнала к шуму и искажению [Signal to Noise & Distortion]
SRD
Устройство малого радиуса действия [Short Range Device]
TBR
Технические основы регулирования [Technical Basis for Regulation]
TDD
Дуплексная связь с временным разделением каналов [Time Division Duplexing]
TDM
Временное разделение каналов [Time Division Multiplexing]
<2>Библиография
[1]
МЭК 60050-713
(IEC 60050-713)
Международный электротехнический словарь. Часть 713. Радиосвязь: приемники, передатчики, сети и их режим работы
( International Electrotechnical Vocabulary - Part 713: Radiocommunications: transmitters, receivers, networks and operation)
[2]
МЭК 60050-705
(IEC 60050-705)
Международный электротехнический словарь. Глава 705: Распространение радиоволн ( International Electrotechnical Vocabulary - Chapter 705: Radio wave propagation)
[3]
МЭК 60050-702
(IEC 60050-702)
Международный электротехнический словарь. Глава 702: Колебания, сигналы и соответствующие устройства
( International Electrotechnical Vocabulary - Chapter 702: Oscillations, signals and related devices)
[4]
МЭК 60050-121
(IEC 60050-121)
Международный электротехнический словарь. Глава 121: Электромагнетизм ( International Electrotechnical Vocabulary - Part 121: Electromagnetism)
[5]
МЭК 60050-712
(IEC 60050-712)
Международный электротехнический словарь. Глава 712: Антенны ( International Electrotechnical Vocabulary - Chapter 712: Antennas)
[6]
МЭК 60050-221
(IEC 60050-221)
Международный электротехнический словарь. Глава 221: Магнитные материалы и компоненты
( International Electrotechnical Vocabulary - Chapter 221: Magnetic materials and components)
[7]
ИСО/МЭК 2382-9:1995
(ISO/IEC2382-9:1995)
Информационная технология. Словарь. Часть 9. Обмен данными ( Information technology - Vocabulary - Part 9: Data communication)
[8]
МЭК 60050-725
(IEC 60050-725)
Международный электротехнический словарь. Глава 725: Космическая радиосвязь ( International Electrotechnical Vocabulary - Chapter 725: Space radiocommunications)
[9]
МЭК 60050-714
(IEC 60050-714)
Международный электротехнический словарь. Глава 714: Коммутация и сигнализация в электросвязи
( International Electrotechnical Vocabulary - Chapter 714: Switching and signalling in telecommunications)
[10]
МЭК 60050-704
(IEC 60050-704)
Международный Электротехнический словарь. Глава 704. Техника передачи ( International Electrotechnical Vocabulary - Chapter 704: Transmission)
[11]
МЭК 60050-161
(IEC 60050-161)
Международный электротехнический словарь. Глава 161: Электромагнитная совместимость ( International Electrotechnical Vocabulary. Chapter 161: Electromagnetic compatibility)
[12]
ИСО/МЭК 8824-1
(ISO/IEC 8824-1)
Информационные технологии. Абстрактная синтаксическая нотация версии один
(АСН.1). Часть 1. Спецификация основной нотации
(Information technology - Abstract Syntax Notation One (ASN.1): Specification of basic notation)1)
[13]
ИСО/МЭК 9834-1
(ISO/IEC 9834-1)
Информационные технологии. Взаимосвязь открытых систем. Процедуры действий уполномоченных по регистрации ВОС. Часть 1. Общие процедуры и верхние дуги дерева идентификатора объекта АСН.1
( Information technology - Open Systems Interconnection - Procedures for the operation of OSI Registration Authorities: General procedures and top arcs of the ASN. 1 Object Identifier tree)
[14]
ИСО/МЭК 15962]
(ISO/IEC 15962)
Информационные технологии. Радиочастотная идентификация (RFID) для управления предметами. Протокол данных: правила кодирования данных и функции логической памяти
( Information technology - Radio frequency identification ( RFID) for item management - Data protocol: data encoding rules and logical memory functions)
[15]
ИСО/МЭК 19762-1
(ISO/IEC 19762-1)
Информационные технологии. Технологии автоматической идентификации и сбора данных (АИСД). Гармонизированный словарь. Часть 1. Общие термины в области АIDC ( Information technology - Automatic identification and data capture ( AIDC) techniques - Harmonized vocabulary - Part 1: General terms relating to AIDC)
[16]
ИСО/МЭК 19762-2
(ISO/IEC 19762-2)
Информационные технологии. Технологии автоматической идентификации и сбора данных (АИСД). Гармонизированный словарь. Часть 2. Оптические носители данных (ОНД)
( Information technology - Automatic identification and data capture ( AIDC) techniques - Harmonized vocabulary - Part 2: Optically readable media ( ORM))
[17]
ИСО/МЭК 19762-3
(ISO/IEC 19762-3)
Информационные технологии. Технологии автоматической идентификации и сбора данных (АИСД). Гармонизированный словарь. Часть 3. Радиочастотная идентификация (РЧИ)
( Information technology - Automatic identification and data capture ( AIDC) techniques - Harmonized vocabulary - Part 3: Radio frequency identification ( RFID))
[18]
ИСО/МЭК 19762-5
(ISO/IEC 19762-5)
Информационные технологии. Технологии автоматической идентификации и сбора данных (АИСД). Гармонизированный словарь. Часть 5. Системы определения места нахождения
( Information technology - Automatic identification and data capture ( AIDC) techniques - Harmonized vocabulary - Part 5: Locating systems)
[19]
ИСО/МЭК 18000-6
(ISO/IEC 18000-6)
Информационные технологии. Радиочастотная идентификация для управления предметами. Часть 6. Параметры радиоинтерфейса для диапазона частот 860 - 960 МГц ( Information technology - Radio frequency identification for item management - Part 6: Parameters for air interface communications at 860 MHz to 960 MHz)
_____________
1)В оригинале ИСО/МЭК 19762-4 стандарты [12] - [19] включены в раздел «Библиография», однако следует учитывать, что в основном тексте стандарта ссылок на них нет.
<2>
Источник: ГОСТ Р ИСО/МЭК 19762-4-2011: Информационные технологии. Технологии автоматической идентификации и сбора данных (АИСД). Гармонизированный словарь. Часть 4. Общие термины в области радиосвязи оригинал документа
Англо-русский словарь нормативно-технической терминологии > ETSI
-
6 entity
- хозяйственная единица
- сущность
- объект (электросвязи)
- объект
- логический объект уровня
- логически целостный элемент предметной области
логически целостный элемент предметной области
Логически целостный элемент предметной области, информация о котором хранится в базе данных
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]Тематики
EN
логический объект уровня
объект уровня
Активный элемент уровня взаимосвязи открытых систем, выполняющий определенное подмножество его функций.
[ ГОСТ 24402-88]Тематики
Синонимы
EN
объект
То что может быть индивидуально описано и рассмотрено.
Примечание
Объектом может быть, например:
- деятельность или процесс
- продукция
- организация, система или отдельное лицо, или
- любая комбинация из них.
[ИСО 8402-94 ]
объект
Любая часть, элемент, устройство, подсистема, функциональная единица, аппаратура или система, которые можно рассматривать в отдельности [12].
Примечания
1. Объект может состоять из технических средств, программных средств или их сочетания и может также в частных случаях включать технический персонал.
2. Ряд объектов, например, их совокупность или выборка, может рассматриваться как объект.
[12] Международный стандарт СЕI IЕС 50 (191).
Глава 191. Надежность и качество услуг.
[ОСТ 45.127-99]
объект
Деятельность или процесс, продукция, организация, система, отдельное лицо или любая комбинация из них, индивидуально описанная и рассмотренная.
[ ГОСТ Р 52104-2003]
объект
Составная часть схемы, отражающая неделимый элемент описываемой предметной области.
[Департамент лингвистических услуг Оргкомитета «Сочи 2014». Глоссарий терминов]
объект
1. Предмет, вещь, явление, на которые направлена деятельность, то, что подвергается какому-либо воздействию. 2. В обиходной речи — вообще всякий предмет, вещь. 3. В философии — то, что существует вне нас и независимо от нас, внешний мир, действительность. В словаре принято первое из перечисленных значений (см., например, Объект управления, Хозяйственные объекты, Экономический объект).
[ http://slovar-lopatnikov.ru/]EN
object
Scheme component reflecting a primary unit of object domain.
[Департамент лингвистических услуг Оргкомитета «Сочи 2014». Глоссарий терминов]Тематики
- защита информации
- ресурсосбережение, обращение с отходами
- спорт (управление Играми)
- управл. качеством и обеспеч. качества
- экономика
EN
объект (электросвязи)
Оборудование электросвязи или его компоненты, которые можно рассматривать в отдельности.
Примечание
Объект (электросвязи) может состоять из технических средств, программных средств или их сочетания. Например, комплекс оборудования электросвязи или система коммутации может рассматриваться как объект.
[ОСТ 45.152-99 ]Тематики
- надежность средств электросвязи
- тех. обсл. и ремонт средств электросвязи
EN
хозяйственная единица
Лицо, партнер, корпорация или другая организационная единица, такая как подразделение или дочерняя компания. Объект учета, для которого формируются бухгалтерские отчеты, может отличаться от юридической хозяйственной единицы.
[ http://www.lexikon.ru/dict/uprav/index.html]Тематики
EN
3.16 сущность (entity): Конкретизация или абстракция, различаемая в пределах системы.
Примечание - Примерами сущностей являются: система, подсистема, компонент, класс, объект, интерфейс, клиент, процесс, приложение, спецификация.
Источник: ГОСТ Р 53633.1-2009: Информационная технология. Сеть управления электросвязью. Расширенная схема деятельности организации связи (eТОМ). Декомпозиция и описания процессов. Процессы уровня 2 eTOM. Основная деятельность. Управление взаимоотношениями с поставщиками и партнерами оригинал документа
3.16 сущность (entity): Конкретизация или абстракция, различаемая в пределах системы.
Примечание - Примерами сущностей являются: система, подсистема, компонент, класс, объект, интерфейс, клиент, процесс, приложение, спецификация.
Источник: ГОСТ Р 53633.2-2009: Информационные технологии. Сеть управления электросвязью. Расширенная схема деятельности организации связи (eТОМ). Декомпозиция и описания процессов. Процессы уровня 2 eTOM. Основная деятельность. Управление и эксплуатация ресурсов оригинал документа
2.19 сущность (entity): Конкретизация или абстракция, различаемая в пределах системы.
Примечание - Примерами сущностей являются: система, подсистема, компонент, класс, объект, интерфейс, клиент, процесс, приложение, спецификация.
Источник: ГОСТ Р 53633.0-2009: Информационные технологии. Сеть управления электросвязью. Расширенная схема деятельности организации связи (eТОМ). Общая структура бизнес-процессов оригинал документа
3.16 сущность (entity): Конкретизация или абстракция, различаемые в пределах системы.
Примечание - Примерами сущностей являются: система, подсистема, компонент, класс, объект, интерфейс, клиент, процесс, приложение, спецификация.
Источник: ГОСТ Р 53633.3-2009: Информационная технология. Сеть управления электросвязью. Расширенная схема деятельности организации связи (eТОМ). Декомпозиция и описания процессов. Процессы уровня 2 eTOM. Основная деятельность. Управление взаимоотношениями с клиентами оригинал документа
Объект уровня
Entity
Активный элемент уровня взаимосвязи открытых систем, выполняющий определенное подмножество его функций
Источник: ГОСТ 24402-88: Телеобработка данных и вычислительные сети. Термины и определения оригинал документа
3.16 сущность (entity): Конкретизация или абстракция, различаемые в пределах системы.
Примечание - Примерами сущностей являются система, подсистема, компонент, класс, объект, интерфейс, клиент, процесс, приложение, спецификация.
Источник: ГОСТ Р 53633.6-2012: Информационные технологии. Сеть управления электросвязью. Расширенная схема деятельности организации связи (eTOM). Декомпозиция и описания процессов. Процессы уровня 2 eTOM. Стратегия, инфраструктура и продукт Разработка и управление услугами оригинал документа
3.29 сущность (entity): Любая конкретная или абстрактная вещь в рамках рассматриваемого домена.
Источник: ГОСТ Р ИСО 19439-2008: Интеграция предприятия. Основа моделирования предприятия оригинал документа
3.16 сущность (entity): Конкретизация или абстракция, различаемые в пределах системы.
Примечание - Примерами сущностей являются система, подсистема, компонент, класс, объект, интерфейс, клиент, процесс, приложение, спецификация.
Источник: ГОСТ Р 53633.8-2012: Информационные технологии. Сеть управления электросвязью. Расширенная схема деятельности организации связи (eTOM). Декомпозиция и описания процессов. Процессы уровня 2 eTOM. Стратегия, инфраструктура и продукт. Разработка и управление цепочками поставок оригинал документа
3.16 сущность (entity): Конкретизация или абстракция, различаемые в пределах системы.
Примечание - Примерами сущностей являются система, подсистема, компонент, класс, объект, интерфейс, клиент, процесс, приложение, спецификация.
Источник: ГОСТ Р 53633.5-2012: Информационные технологии. Сеть управления электросвязью. Расширенная схема деятельности организации связи (eTOM). Декомпозиция и описания процессов. Процессы уровня 2 eTOM. Стратегия, инфраструктура и продукт. Управление маркетингом и предложением продукта оригинал документа
3.1.2 объект (entity): Класс информации, определенный общими свойствами.
Источник: ГОСТ Р ИСО 13584-20-2006: Системы автоматизации производства и их интеграция. Библиотека деталей. Часть 20. Логический ресурс. Логическая модель выражений оригинал документа
3.147 сущность (entity): Любая конкретная или абстрактная вещь в рамках рассматриваемого домена.
Источник: ГОСТ Р 54136-2010: Системы промышленной автоматизации и интеграция. Руководство по применению стандартов, структура и словарь оригинал документа
Англо-русский словарь нормативно-технической терминологии > entity
-
7 plc
- связь по ЛЭП
- программируемый логический контроллер
- несущая в канале ВЧ-связи по ЛЭП
- маскирование потери пакета
- контроллер с программируемой логикой
- акционерная компания с ограниченной ответственностью
акционерная компания с ограниченной ответственностью
AG - аббревиатура для обозначения AKTIENGESELLSCHAFT (акционерное общество). Оно пишется после названия немецких, австрийских или швейцарских компаний и является эквивалентом английской аббревиатуры plc (public limited company-акционерная компания с ограниченной ответственностью). Сравни: GmbH.
[ http://www.vocable.ru/dictionary/533/symbol/97]Тематики
EN
DE
- AG
контроллер с программируемой логикой
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
маскирование потери пакета
Метод сокрытия факта потери медиапакетов путем генерирования синтезируемых пакетов (МСЭ-T G.1050).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
несущая в канале ВЧ-связи по ЛЭП
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999]Тематики
- электротехника, основные понятия
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего. Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы. Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7. Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series. Рис. 4. Резервированный контроллер FCP270.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA). Рис. 5. Контроллер AC800M.
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
связь по ЛЭП
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
Англо-русский словарь нормативно-технической терминологии > plc
8 facility
- электроустановка
- средство
- производственный объект
- основные средства
- объект
- оборудование
- канал связи
- здание
- аппаратура
аппаратура
-
[Интент]FR
-
виды аппаратуры
- низковольтная аппаратура
- аппаратура распределения
- аппаратура управления
- аппаратура распределения и управления
- аппаратура для цепей управления
- коммутационная аппаратура
- контрльно-измерительная аппаратура (КИП)
- электронная аппаратура
- радиоэлектронная аппаратура
- закрытая аппаратура без вентиляции, охлаждаемая естественной конвекцией воздуха
- закрытая вентилируемая аппаратура
- открытая аппаратура
- периферийная аппаратура
- переносная аппаратура
- портативная аппаратура
Тематики
- аппарат, изделие, устройство...
EN
здание
Наземное сооружение с помещениями для проживания, деятельности людей, хранения сырья или продукции или содержания животных.
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]
здание
Наземное строительное сооружение с помещениями для проживания и (или) деятельности людей, размещения производств, хранения продукции или содержания животных
[ ГОСТ Р 52086-2003]
здание
Строительная система, состоящая из несущих и ограждающих или совмещенных несущих и ограждающих конструкций, образующих наземный замкнутый объем, предназначенный для проживания или пребывания людей в зависимости от функционального назначения и для выполнения различного вида производственных процессов.
[РД 01.120.00-КТН-228-06]
здание
Покрытая крышей конструкция со стенами, в которой энергия применяется для создания определенных условий внутри помещения. В качестве здания может рассматриваться здание целиком или его часть, спроектированная или перестроенная для отдельной эксплуатации.
[ДИРЕКТИВА 2002/91/ЕС ЕВРОПЕЙСКОГО ПАРЛАМЕТА И СОВЕТА от 16 декабря 2002 г. по энергетическим характеристикам зданий]
здание
Результат строительства, представляющий собой объемную строительную систему, имеющую надземную и (или) подземную части, включающую в себя помещения, сети инженерно-технического обеспечения и системы инженерно-технического обеспечения и предназначенную для проживания и (или) деятельности людей, размещения производства, хранения продукции или содержания животных.
[Технический регламент о безопасности зданий и сооружений]
здание
Результат строительства, представляющий собой объемную строительную систему, имеющую надземную и (или) подземную части, включающую в себя помещения, сети и системы инженерно-технического обеспечения и предназначенную для проживания и (или) деятельности людей, размещения производства, хранения продукции или содержания животных [4].
Примечание - Данное определение может относиться к зданию в целом или к отдельным частям здания, которые могут использоваться отдельно.
[ ГОСТ Р 54860-2011]- Промышленные здания
-
Общественные здания
-
учреждения и организации управления, финансирования, кредитования, госстраха, просвещения, дошкольные;
- библиотеки, архивы;
- предприятия торговли, общепита, бытового обслуживания населения;
- гостиницы;
- лечебные учреждения;
- музеи;
- зрелищные предприятия и спортивные сооружения
-
учреждения и организации управления, финансирования, кредитования, госстраха, просвещения, дошкольные;
- Жилые здания
Части здания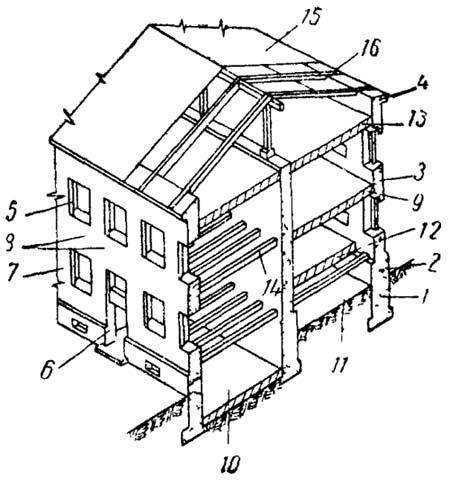
1 - фундамент;
2 - цоколь;
3 - поле стены (лицевая поверхность стены);
4 - карниз;
5 - оконный проем;
6 - дверной проем;
7 - простенок;
8 - перемычка (часть стены, перекрывающая оконные или дверные проемы);
9 - междуэтажное перекрытие;
10 - подвал;
11 - подполье;
12 - нижнее перекрытие;
13 - чердачное перекрытие;
14 - балки;
15 - кровля;
16 - стропила;
(15+16) - крыша[Грингауз Ф.И. Слесарь-жестянщик по промышленной вентиляции. Госстройиздат, 1959. 264 стр.]
Тематики
- здания, сооружения, помещения
- магистральный нефтепроводный транспорт
- опалубка
- теплоснабжение зданий
- энергосбережение
EN
DE
FR
канал связи
канал
Средства односторонней передачи данных. Примером канала может быть полоса частот, выделенная одному передатчику при радиосвязи. В некоторой линии можно образовать несколько каналов связи, по каждому из которых передается своя информация. При этом говорят, что линия разделяется между несколькими каналами. Существуют два метода разделения линии передачи данных: временное мультиплексирование (иначе разделение по времени или TDM), при котором каждому каналу выделяется некоторый квант времени, и частотное разделение (FDM - Frequency Division Method), при котором каналу выделяется некоторая полоса частот.
[И.П. Норенков, В.А. Трудоношин. Телекоммуникационные технологии и сети. МГТУ им. Н.Э.Баумана. Москва 1999]В одной линии связи можно образовать несколько каналов связи (виртуальных или логических каналов), например путем частотного или временного разделения каналов. Канал связи - это средство односторонней передачи данных. Если линия связи монопольно используется каналом связи, то в этом случае линию связи называют каналом связи.
[ http://www.lessons-tva.info/edu/telecom-loc/m1t2_2loc.html]Тематики
- электросвязь, основные понятия
Синонимы
EN
оборудование
оборудование
Совокупность связанных между собой частей или устройств, из которых по крайней мере одно движется, а также элементы привода, управления и энергетические узлы, которые предназначены для определенного применения, в частности для обработки, производства, перемещения или упаковки материала. К термину «оборудование» относят также машину и совокупность машин, которые так устроены и управляемы, что они функционируют как единое целое для достижения одной и той же цели.
[ГОСТ ЕН 1070-2003]
-
[IEV number 151-11-25 ]
оборудование
Оснащение, материалы, приспособления, устройства, механизмы, приборы, инструменты и другие принадлежности, используемые в качестве частей электрической установки или в соединении с ней.
[ ГОСТ Р МЭК 60204-1-2007]EN
equipment
single apparatus or set of devices or apparatuses, or the set of main devices of an installation, or all devices necessary to perform a specific task
NOTE – Examples of equipment are a power transformer, the equipment of a substation, measuring equipment.
[IEV number 151-11-25 ]
equipment
material, fittings, devices, components, appliances, fixtures, apparatus, and the like used as part of, or in connection with, the electrical equipment of machines
[IEC 60204-1-2006]FR
équipement, m
matériel, m
appareil unique ou ensemble de dispositifs ou appareils, ou ensemble des dispositifs principaux d'une installation, ou ensemble des dispositifs nécessaires à l'accomplissement d'une tâche particulière
NOTE – Des exemples d’équipement ou de matériel sont un transformateur de puissance, l’équipement d’une sous-station, un équipement de mesure.
[IEV number 151-11-25]Тематики
EN
- accessories
- apparatus
- appliance
- assets
- environment
- equipment
- facility
- fitment
- fixing
- gear
- H/W
- hardware
- hardware environment
- HW
- installation
- instrument
- instrumentation
- layout
- machinery
- outfit
- paraphernalia
- plant
- plant stock
- product
- provisions
- rig
- rigging
- set-up
- stock-in-trade
- tackle
- technical equipment
- technique
DE
FR
- machine
- matériel, m
- équipement, m
объект
То что может быть индивидуально описано и рассмотрено.
Примечание
Объектом может быть, например:
- деятельность или процесс
- продукция
- организация, система или отдельное лицо, или
- любая комбинация из них.
[ИСО 8402-94 ]
объект
Любая часть, элемент, устройство, подсистема, функциональная единица, аппаратура или система, которые можно рассматривать в отдельности [12].
Примечания
1. Объект может состоять из технических средств, программных средств или их сочетания и может также в частных случаях включать технический персонал.
2. Ряд объектов, например, их совокупность или выборка, может рассматриваться как объект.
[12] Международный стандарт СЕI IЕС 50 (191).
Глава 191. Надежность и качество услуг.
[ОСТ 45.127-99]
объект
Деятельность или процесс, продукция, организация, система, отдельное лицо или любая комбинация из них, индивидуально описанная и рассмотренная.
[ ГОСТ Р 52104-2003]
объект
Составная часть схемы, отражающая неделимый элемент описываемой предметной области.
[Департамент лингвистических услуг Оргкомитета «Сочи 2014». Глоссарий терминов]
объект
1. Предмет, вещь, явление, на которые направлена деятельность, то, что подвергается какому-либо воздействию. 2. В обиходной речи — вообще всякий предмет, вещь. 3. В философии — то, что существует вне нас и независимо от нас, внешний мир, действительность. В словаре принято первое из перечисленных значений (см., например, Объект управления, Хозяйственные объекты, Экономический объект).
[ http://slovar-lopatnikov.ru/]EN
object
Scheme component reflecting a primary unit of object domain.
[Департамент лингвистических услуг Оргкомитета «Сочи 2014». Глоссарий терминов]Тематики
- защита информации
- ресурсосбережение, обращение с отходами
- спорт (управление Играми)
- управл. качеством и обеспеч. качества
- экономика
EN
электроустановка
Любое сочетание взаимосвязанного электрического оборудования в пределах данного пространства или помещения.
[Макаров Е.Ф. Справочник по электрическим сетям 0,4-35 кВ и 110-1150 кВ]
электроустановка
Совокупность машин, аппаратов, линий и вспомогательного оборудования (вместе с сооружениями и помещениями, в которых они установлены), предназначенных для производства, преобразования, трансформации, передачи, распределения электрической энергии и преобразования ее в другие виды энергии
[ПУЭ]
электроустановка
Энергоустановка, предназначенная для производства или преобразования, передачи, распределения или потребления электрической энергии.
[ ГОСТ 19431-84]
электроустановка
Совокупность взаимосвязанного электрического оборудования, имеющего согласованные характеристики и предназначенного для определенной цели.
[ ГОСТ Р МЭК 60050-826-2009]
установка
-
[IEV number 151-11-26]EN
electrical installation
assembly of associated electric equipment having co-ordinated characteristics to fulfil specific purposes
[IEV number 826-10-01]
installation
one apparatus or a set of devices and/or apparatuses associated in a given location to fulfil specified purposes, including all means for their satisfactory operation
[IEV number 151-11-26]FR
installation électrique, f
ensemble de matériels électriques associés ayant des caractéristiques coordonnées en vue d'une application donnée
[IEV number 826-10-01]
installation, f
appareil unique ou ensemble de dispositifs ou d'appareils associés en vue d’une application déterminée et situés en un emplacement donné, y compris les moyens nécessaires à leur fonctionnement correct
[IEV number 151-11-26]Параллельные тексты EN-RU
In water installations, harmonics are mainly generated by Variable Speed Drives, Ozone generators and UV lamps, which should all be carefully managed.
Применение в электроустановках систем водоснабжения приводов с регулируемой частотой вращения, генераторов озона и УФ-ламп приводит к загрязнению электросети гармоническими составляющими, которые нужно тщательно отфильтровывать.
[Перевод Интент]11.1 Стандарт распространяется на проектирование, монтаж и проверку электроустановок следующих объектов:
a) жилых зданий;
b) торговых предприятий;
c) общественных зданий;
d) производственных зданий;
e) сельскохозяйственных и садоводческих строений;
f) сборных зданий;
g) жилых автофургонов, стоянок для них и аналогичных участков;
h) строительных площадок, выставок, ярмарок и других временных сооружений;
i) пристаней для малых судов, используемых на досуге;
j) наружного освещения и установок аналогичного назначения (кроме перечисления е) в подразделе 11.3);
k) медицинских учреждений;
i) подвижных или транспортируемых средств;
m) фотоэлектрических систем;
n) низковольтных генераторных установок.
Примечание - Под терминами «здание», «предприятие», «строение», «сооружение», «учреждение» понимают также земельные участки и все, что на них находится.
... электроустановки потребителя, расположенные вне зданий
[ ГОСТ Р 50571. 1- 2009 ( МЭК 60364-1: 2005)]
По условиям электробезопасности электроустановки классифицируются следующим образом:
- электроустановки напряжением до 1 кВ с заземленной нейтралью
- электроустановки напряжением до 1 кВ с изолированной нейтралью
- электроустановки напряжением выше 1 кВ в сетях с эффективно заземленной нейтралью (с большими токами замыкания на землю)
- электроустановки напряжением выше 1 кВ в сетях с изолированной нейтралью (с малыми токами замыкания на землю).
Тематики
Близкие понятия
- электроустановка здания
- электроустановка квартиры
- электроустановка объекта
- электроустановка потребителя
- электроустановка промышленного предприятия
- электроустановки жилых и общественных зданий
Действия
- включение электроустановки
- заземление электроустановки
- зануление электроустановки
- защита электроустановки от перенапряжений
- монтаж электроустановки
- обслуживание электроустановки
- организация эксплуатации электроустановки
- присоединение электроустановки к электрической сети
- проектирование электроустановки
- сертификация электроустановки
- создание электроустановки
- техническое освидетельствование текущего состояния электроустановки
- устройство электроустановки
- эксплуатация электроустановки
Синонимы
EN
DE
- elektrische Anlage, f
FR
- installation électrique, f
4.13 основные средства (facility): Физические устройства или оборудование, способствующие выполнению действий, например, здания, инструменты, принадлежности.
Источник: ГОСТ Р ИСО/МЭК 12207-2010: Информационная технология. Системная и программная инженерия. Процессы жизненного цикла программных средств оригинал документа
4.7 основные средства (facility): Физические средства или оборудование, способствующие выполнению действий (например, здания, инструменты, принадлежности).
Источник: ГОСТ Р ИСО/МЭК 15288-2005: Информационная технология. Системная инженерия. Процессы жизненного цикла систем оригинал документа
3.1 средство (facility): Предназначенный для выполнения определенной функции или оказания услуги технологический комплекс в том числе предприятие, обеспечивающее его функционирование, здание, сооружение, устройство или оборудование, а также транспортное средство.
Примечание - Данное определение включает в себя любой код программного обеспечения, являющийся ключевым для обеспечения безопасности и применения менеджмента безопасности.
Источник: ГОСТ Р 53661-2009: Система менеджмента безопасности цепи поставок. Руководство по внедрению оригинал документа
3.1 средство (facility): Предназначенный для выполнения определенной функции или оказания услуги технологический комплекс, в том числе предприятие, обеспечивающее его функционирование, здание, сооружение, устройство или оборудование, а также транспортное средство.
Примечание - Данное определение включает в себя любой код программного обеспечения, являющийся ключевым для обеспечения безопасности и применения менеджмента безопасности.
Источник: ГОСТ Р 53663-2009: Система менеджмента безопасности цепи поставок. Требования оригинал документа
2.21 производственный объект (facility): Установка, комплект установок (стационарные или передвижные) или производственные процессы, которые могут быть определены в рамках единой географической границы, организационной единицы или единого производственного процесса.
Источник: ГОСТ Р ИСО 14064-1-2007: Газы парниковые. Часть 1. Требования и руководство по количественному определению и отчетности о выбросах и удалении парниковых газов на уровне организации оригинал документа
2.22 производственный объект (facility): Установка, комплект установок (стационарные или передвижные) или производственные процессы, которые могут быть определены в рамках единой географической границы, организационной единицы или единого производственного процесса.
Источник: ГОСТ Р ИСО 14064-3-2007: Газы парниковые. Часть 3. Требования и руководство по валидации и верификации утверждений, касающихся парниковых газов оригинал документа
3.14 производственный объект (facility): Одна установка, комплект установок или производственные процессы (стационарные или передвижные), которые могут быть определены в рамках единой географической границы, организационной единицы или производственного процесса.
[ИСО 14064-1:2006]
Источник: ГОСТ Р ИСО 14050-2009: Менеджмент окружающей среды. Словарь оригинал документа
Англо-русский словарь нормативно-технической терминологии > facility
9 ANS
- сетевая секция доступа
- сервер объявлений
- модель расширенного канала
- Американское ядерное общество
- Американский национальный стандарт
Американский национальный стандарт
(Справочник по сухопутной подвижной связи (включая беспроводный доступ), 2005 г.)
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
Американское ядерное общество
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
сервер объявлений
(МСЭ-Т J.165).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
сетевая секция доступа
Сетевая секция, соединенная (как минимум) с одной канальной секцией доступа. (МСЭ-Т Х.144, МСЭ-Т Х.145, МСЭ-Т Х.147).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
01.05.24 модель расширенного канала [ extended channel model]: Система кодирования и передачи как байтов с данными сообщения, так и управляющей информации о сообщении, в пределах которой декодер работает в режиме расширенного канала.
Примечание - Управляющая информация передается с использованием управляющих последовательностей интерпретации в расширенном канале (ECI).
<2>4 Сокращения1)
1)Следует учитывать, что в соответствии с оригиналом ИСО/МЭК 19762-1 в данном разделе присутствует сокращение CSMA/CD, которое в тексте стандарта не используется.
Кроме того, сокращения отсортированы в алфавитном порядке.
Al
Идентификатор применения [application identifier]
ANS
Американский национальный стандарт [American National Standard]
ANSI
Американский национальный институт стандартов [American National Standards Institute]
ASC
Аккредитованный комитет по стандартам [Accredited Standards Committee]
вес
Контрольный знак блока [block check character]
BCD
Двоично-десятичный код (ДДК) [binary coded decimal]
BER
Коэффициент ошибок по битам [bit error rate]
CRC
Контроль циклическим избыточным кодом [cyclic redundancy check]
CSMA/CD
Коллективный доступ с контролем несущей и обнаружением конфликтов [carrier sense multiple access with collision detection network]
CSUM
Контрольная сумма [check sum]
Dl
Идентификатор данных [data identifier]
ECI
Интерпретация в расширенном канале [extended channel interpretation]
EDI
Электронный обмен данными (ЭОД) [electronic data interchange]
EEPROM
Электрически стираемое программируемое постоянное запоминающее устройство [electrically erasable programmable read only memory]
HEX
Шестнадцатеричная система счисления [hexadecimal]
INCITS
Международный комитет по стандартам информационных технологий [International Committee for Information Technology Standards]
LAN
Локальная вычислительная сеть [local area network]
Laser
Усиление света с помощью вынужденного излучения [light amplification by the stimulated emission of radiation]
LED
Светоизлучающий диод [light emitting diode]
LLC
Управление логической связью [logical link control]
LSB
Младший значащий бит [least significant bit]
МНЮ
Аккредитованный комитет по отраслевым стандартам в сфере обработки грузов [Accredited Standards Committee for the Material Handling Industry]
MSB
Старший значащий бит [most significant bit]
MTBF
Средняя наработка на отказ [mean time between failures]
MTTR
Среднее время ремонта [mean time to repair]
NRZ
Без возвращения к нулю [non-return to zero code]
NRZ Space
Кодирование без возвращения к нулю с перепадом на нулях [non-return to zero-space]
NRZ-1
Кодирование без возвращения к нулю с перепадом на единицах [non-return to zero invert on ones]
NRZ-M
Запись без возвращения к нулю (метка) [non-return to zero (mark) recording]
RTI
Возвратное транспортное упаковочное средство [returnable transport item]
RZ
Кодирование с возвратом к нулю [return to zero]
VLD
Светоизлучающий лазерный диод [visible laser diode]
<2>Библиография
[1]
ИСО/МЭК Руководство 2
Стандартизация и связанная с ней деятельность. Общий словарь
(ISO/IECGuide2)
(Standardization and related activities - General vocabulary)
[2]
ИСО/МЭК 2382-1
Информационные технологии. Словарь - Часть 1. Основные термины
(ISO/IEC 2382-1)
(Information technology - Vocabulary - Part 1: Fundamental terms)
[3]
ИСО/МЭК 2382-4
Информационные технологии. Словарь - Часть 4. Организация данных
(ISO/IEC 2382-4)
(Information technology - Vocabulary - Part 4: Organization of data)
[4]
ИСО/МЭК 2382-9
Информационные технологии. Словарь. Часть 9. Передача данных
(ISO/IEC 2382-9)
(Information technology - Vocabulary - Part 9: Data communication)
[5]
ИСО/МЭК 2382-16
Информационные технологии. Словарь. Часть 16. Теория информации
(ISO/IEC 2382-16)
(Information technology - Vocabulary - Part 16: Information theory)
[6]
ИСО/МЭК 19762-2
Информационные технологии. Технологии автоматической идентификации и сбора данных (АИСД). Гармонизированный словарь. Часть 2. Оптические носители данных (ОНД)
(ISO/IEC 19762-2)
(Information technology - Automatic identification and data capture (AIDC) techniques - Harmonized vocabulary - Part 2: Optically readable media (ORM))
[7]
ИСО/МЭК 19762-3
Информационные технологии. Технологии автоматической идентификации и сбора данных (АИСД). Гармонизированный словарь. Часть 3. Радиочастотная идентификация (РЧИ)
(ISO/IEC 19762-3)
(Information technology - Automatic identification and data capture (AIDC) techniques - Harmonized vocabulary - Part 3: Radio frequency identification (RFID)
[8]
ИСО/МЭК 19762-4
Информационные технологии. Технологии автоматической идентификации и сбора данных (АИСД). Гармонизированный словарь. Часть 4. Основные термины в области радиосвязи
(ISO/IEC 19762-4)
(Information technology-Automatic identification and data capture (AIDC) techniques - Harmonized vocabulary - Part 4: General terms relating to radio communications)
[9]
ИСО/МЭК 19762-5
Информационные технологии. Технологии автоматической идентификации и сбора данных (АИСД). Гармонизированный словарь. Часть 5. Системы определения места нахождения
(ISO/IEC 19762-5)
(Information technology - Automatic identification and data capture (AIDC) techniques - Harmonized vocabulary - Part 5: Locating systems)
[10]
МЭК 60050-191
Международный Электротехнический Словарь. Глава 191. Надежность и качество услуг
(IEC 60050-191)
(International Electrotechnical Vocabulary - Chapter 191: Dependability and quality of Service)
[11]
МЭК 60050-702
Международный Электротехнический Словарь. Глава 702. Колебания, сигналы и соответствующие устройства
(IEC 60050-702)
(International Electrotechnical Vocabulary - Chapter 702: Oscillations, signals and related devices)
[12]
МЭК 60050-704
Международный Электротехнический словарь. Глава 704. Техника передачи
(IEC 60050-704)
(International Electrotechnical Vocabulary. Chapter 704: Transmission)
[13]
МЭК 60050-845
Международный электротехнический словарь. Глава 845. Освещение
(IEC 60050-845)
(International Electrotechnical Vocabulary - Chapter 845: Lighting)
<2>
Источник: ГОСТ Р ИСО/МЭК 19762-1-2011: Информационные технологии. Технологии автоматической идентификации и сбора данных (АИСД). Гармонизированный словарь. Часть 1. Общие термины в области АИСД оригинал документа
Англо-русский словарь нормативно-технической терминологии > ANS
10 LED
светодиод
Полупроводниковый прибор, преобразующий электрическую энергию в энергию оптического излучения на основе явления инжекционной электролюминесценции в полупроводниковом кристалле с электронно-дырочным переходом, полупроводниковым гетеропереходом, либо контактом металл-полупроводник.
[ ГОСТ 24453-80]
светоизлучающий диод
(светодиод)
Устройство, включающее в себя p-n переход, испускающее световое излучение при прохождении через него электрического тока
(МЭС 845-04-40).
[ ГОСТ Р МЭК 60073-2000]
светоизлучающий диод
СИД
Полупроводниковый диод, излучающий энергию в видимой области спектра в результате рекомбинации электронов и дырок.
[ ГОСТ 15133-77]Тематики
- измерение лазерного излучения
- полупроводниковые приборы
- электротехника, основные понятия
Синонимы
EN
DE
светодиодный индикатор
-
[Интент]
Установленные на плате четыре светодиодных индикатора
Тематики
- электротехника, основные понятия
EN
LED
Светоизлучающий диод
Источник: ГОСТ Р МЭК 61850-7-4-2011: Сети и системы связи на подстанциях. Часть 7. Базовая структура связи для подстанций и линейного оборудования. Раздел 4. Совместимые классы логических узлов и классы данных оригинал документа
01.05.24 модель расширенного канала [ extended channel model]: Система кодирования и передачи как байтов с данными сообщения, так и управляющей информации о сообщении, в пределах которой декодер работает в режиме расширенного канала.
Примечание - Управляющая информация передается с использованием управляющих последовательностей интерпретации в расширенном канале (ECI).
<2>4 Сокращения1)
1)Следует учитывать, что в соответствии с оригиналом ИСО/МЭК 19762-1 в данном разделе присутствует сокращение CSMA/CD, которое в тексте стандарта не используется.
Кроме того, сокращения отсортированы в алфавитном порядке.
Al
Идентификатор применения [application identifier]
ANS
Американский национальный стандарт [American National Standard]
ANSI
Американский национальный институт стандартов [American National Standards Institute]
ASC
Аккредитованный комитет по стандартам [Accredited Standards Committee]
вес
Контрольный знак блока [block check character]
BCD
Двоично-десятичный код (ДДК) [binary coded decimal]
BER
Коэффициент ошибок по битам [bit error rate]
CRC
Контроль циклическим избыточным кодом [cyclic redundancy check]
CSMA/CD
Коллективный доступ с контролем несущей и обнаружением конфликтов [carrier sense multiple access with collision detection network]
CSUM
Контрольная сумма [check sum]
Dl
Идентификатор данных [data identifier]
ECI
Интерпретация в расширенном канале [extended channel interpretation]
EDI
Электронный обмен данными (ЭОД) [electronic data interchange]
EEPROM
Электрически стираемое программируемое постоянное запоминающее устройство [electrically erasable programmable read only memory]
HEX
Шестнадцатеричная система счисления [hexadecimal]
INCITS
Международный комитет по стандартам информационных технологий [International Committee for Information Technology Standards]
LAN
Локальная вычислительная сеть [local area network]
Laser
Усиление света с помощью вынужденного излучения [light amplification by the stimulated emission of radiation]
LED
Светоизлучающий диод [light emitting diode]
LLC
Управление логической связью [logical link control]
LSB
Младший значащий бит [least significant bit]
МНЮ
Аккредитованный комитет по отраслевым стандартам в сфере обработки грузов [Accredited Standards Committee for the Material Handling Industry]
MSB
Старший значащий бит [most significant bit]
MTBF
Средняя наработка на отказ [mean time between failures]
MTTR
Среднее время ремонта [mean time to repair]
NRZ
Без возвращения к нулю [non-return to zero code]
NRZ Space
Кодирование без возвращения к нулю с перепадом на нулях [non-return to zero-space]
NRZ-1
Кодирование без возвращения к нулю с перепадом на единицах [non-return to zero invert on ones]
NRZ-M
Запись без возвращения к нулю (метка) [non-return to zero (mark) recording]
RTI
Возвратное транспортное упаковочное средство [returnable transport item]
RZ
Кодирование с возвратом к нулю [return to zero]
VLD
Светоизлучающий лазерный диод [visible laser diode]
<2>Библиография
[1]
ИСО/МЭК Руководство 2
Стандартизация и связанная с ней деятельность. Общий словарь
(ISO/IECGuide2)
(Standardization and related activities - General vocabulary)
[2]
ИСО/МЭК 2382-1
Информационные технологии. Словарь - Часть 1. Основные термины
(ISO/IEC 2382-1)
(Information technology - Vocabulary - Part 1: Fundamental terms)
[3]
ИСО/МЭК 2382-4
Информационные технологии. Словарь - Часть 4. Организация данных
(ISO/IEC 2382-4)
(Information technology - Vocabulary - Part 4: Organization of data)
[4]
ИСО/МЭК 2382-9
Информационные технологии. Словарь. Часть 9. Передача данных
(ISO/IEC 2382-9)
(Information technology - Vocabulary - Part 9: Data communication)
[5]
ИСО/МЭК 2382-16
Информационные технологии. Словарь. Часть 16. Теория информации
(ISO/IEC 2382-16)
(Information technology - Vocabulary - Part 16: Information theory)
[6]
ИСО/МЭК 19762-2
Информационные технологии. Технологии автоматической идентификации и сбора данных (АИСД). Гармонизированный словарь. Часть 2. Оптические носители данных (ОНД)
(ISO/IEC 19762-2)
(Information technology - Automatic identification and data capture (AIDC) techniques - Harmonized vocabulary - Part 2: Optically readable media (ORM))
[7]
ИСО/МЭК 19762-3
Информационные технологии. Технологии автоматической идентификации и сбора данных (АИСД). Гармонизированный словарь. Часть 3. Радиочастотная идентификация (РЧИ)
(ISO/IEC 19762-3)
(Information technology - Automatic identification and data capture (AIDC) techniques - Harmonized vocabulary - Part 3: Radio frequency identification (RFID)
[8]
ИСО/МЭК 19762-4
Информационные технологии. Технологии автоматической идентификации и сбора данных (АИСД). Гармонизированный словарь. Часть 4. Основные термины в области радиосвязи
(ISO/IEC 19762-4)
(Information technology-Automatic identification and data capture (AIDC) techniques - Harmonized vocabulary - Part 4: General terms relating to radio communications)
[9]
ИСО/МЭК 19762-5
Информационные технологии. Технологии автоматической идентификации и сбора данных (АИСД). Гармонизированный словарь. Часть 5. Системы определения места нахождения
(ISO/IEC 19762-5)
(Information technology - Automatic identification and data capture (AIDC) techniques - Harmonized vocabulary - Part 5: Locating systems)
[10]
МЭК 60050-191
Международный Электротехнический Словарь. Глава 191. Надежность и качество услуг
(IEC 60050-191)
(International Electrotechnical Vocabulary - Chapter 191: Dependability and quality of Service)
[11]
МЭК 60050-702
Международный Электротехнический Словарь. Глава 702. Колебания, сигналы и соответствующие устройства
(IEC 60050-702)
(International Electrotechnical Vocabulary - Chapter 702: Oscillations, signals and related devices)
[12]
МЭК 60050-704
Международный Электротехнический словарь. Глава 704. Техника передачи
(IEC 60050-704)
(International Electrotechnical Vocabulary. Chapter 704: Transmission)
[13]
МЭК 60050-845
Международный электротехнический словарь. Глава 845. Освещение
(IEC 60050-845)
(International Electrotechnical Vocabulary - Chapter 845: Lighting)
<2>
Источник: ГОСТ Р ИСО/МЭК 19762-1-2011: Информационные технологии. Технологии автоматической идентификации и сбора данных (АИСД). Гармонизированный словарь. Часть 1. Общие термины в области АИСД оригинал документа
Англо-русский словарь нормативно-технической терминологии > LED
11 automate programmable à mémoire
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Франко-русский словарь нормативно-технической терминологии > automate programmable à mémoire
12 speicherprogrammierbare Steuerung, f
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Немецко-русский словарь нормативно-технической терминологии > speicherprogrammierbare Steuerung, f
13 programmable logic controller
контроллер с программируемой логикой
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > programmable logic controller
14 programmable controller
программируемый контроллер
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > programmable controller
15 storage-programmable logic controller
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > storage-programmable logic controller
16 automation technologies
технологии для автоматизации
-
[Интент]Параллельные тексты EN-RU
Automation technologies: a strong focal point for our R&D
Технологии для автоматизации - одна из главных тем наших научно исследовательских разработок
Automation is an area of ABB’s business with an extremely high level of technological innovation.
Автоматика относится к одной из областей деятельности компании АББ, для которой характерен исключительно высокий уровень технических инноваций.
In fact, it may be seen as a showcase for exhibiting the frontiers of development in several of today’s emerging technologies, like short-range wireless communication and microelectromechanical systems (MEMS).
В определенном смысле ее можно уподобить витрине, в которой выставлены передовые разработки из области только еще зарождающихся технологий, примерами которых являются ближняя беспроводная связь и микроэлектромеханические системы (micro electromechanical systems MEMS).
Mechatronics – the synthesis of mechanics and electronics – is another very exciting and rapidly developing area, and the foundation on which ABB has built its highly successful, fast-growing robotics business.
Еще одной исключительно интересной быстро развивающейся областью и в то же время фундаментом, на котором АББ в последнее время строит свой исключительно успешный и быстро расширяющийся бизнес в области робототехники, является мехатроника - синтез механики с электроникой.
Robotic precision has now reached the levels we have come to expect of the watch-making industry, while robots’ mechanical capabilities continue to improve significantly.
Точность работы робототехнических устройств достигла сегодня уровней, которые мы привыкли ожидать только на предприятиях часовой промышленности. Большими темпами продолжают расти и механические возможности роботов.
Behind the scenes, highly sophisticated electronics and software control every move these robots make.
А за кулисами всеми перемещениями робота управляют сложные электронные устройства и компьютерные программы.
Throughout industry today we see a major shift of ‘intelligence’ to lower levels in the automation system hierarchy, leading to a demand for more communication within the system.
Во всех отраслях промышленности сегодня наблюдается интенсивный перенос "интеллекта" на нижние уровни иерархии автоматизированных систем, что требует дальнейшего развития внутрисистемных средств обмена.
‘Smart’ transmitters, with powerful microprocessors, memory chips and special software, carry out vital operations close to the processes they are monitoring.
"Интеллектуальные" датчики, снабженные высокопроизводительными микропроцессорами, мощными чипами памяти и специальным программно-математическим обеспечением, выполняют особо ответственные операции в непосредственной близости от контролируемых процессов.
And they capture and store data crucial for remote diagnostics and maintenance.
Они же обеспечивают возможность измерения и регистрации информации, крайне необходимой для дистанционной диагностики и дистанционного обслуживания техники.
The communication highway linking such systems is provided by fieldbuses.
В качестве коммуникационных магистралей, связывающих такого рода системы, служат промышленные шины fieldbus.
In an ideal world there would be no more than a few, preferably just one, fieldbus standard.
В идеале на промышленные шины должно было бы существовать небольшое количество, а лучше всего вообще только один стандарт.
However, there are still too many of them, so ABB has developed ‘fieldbus plugs’ that, with the help of translation, enable devices to communicate across different standards.
К сожалению, на деле количество их типов продолжает оставаться слишком разнообразным. Ввиду этой особенности рынка промышленных шин компанией АББ разработаны "штепсельные разъемы", которые с помощью средств преобразования обеспечивают общение различных устройств вопреки границам, возникшим из-за различий в стандартах.
This makes life easier as well as less costly for our customers. Every automation system is dependent on an electrical network for distributing – and interrupting, when necessary – the power needed to carry out its various functions.
Это, безусловно, не только облегчает, но и удешевляет жизнь нашим заказчикам. Ни одна система автоматики не может работать без сети, обеспечивающей подачу, а при необходимости и отключение напряжения, необходимого для выполнения автоматикой своих задач.
Here, too, we see a clear trend toward more intelligence and communication, for example in traditional electromechanical devices such as contactors and switches.
И здесь наблюдаются отчетливо выраженные тенденции к повышению уровня интеллектуальности и расширению возможностей связи, например, в таких традиционных электромеханических устройствах, как контакторы и выключатели.
We are pleased to see that our R&D efforts in these areas over the past few years are bearing fruit.
Мы с удовлетворением отмечаем, что научно-исследовательские разработки, выполненные нами за последние годы в названных областях, начинают приносить свои плоды.
Recently, we have seen a strong increase in the use of wireless technology in industry.
В последнее время на промышленных предприятиях наблюдается резкое расширение применения техники беспроводной связи.
This is a key R&D area at ABB, and several prototype applications have already been developed.
В компании АББ эта область также относится к числу одной из ключевых тем научно-исследовательских разработок, результатом которых стало создание ряда опытных образцов изделий практического направления.
At the international Bluetooth Conference in Amsterdam in June 2002, we presented a truly ‘wire-less’ proximity sensor – with even a wireless power supply.
На международной конференции по системам Bluetooth, состоявшейся в Амстердаме в июне 2002 г., наши специалисты выступили с докладом о поистине "беспроводном" датчике ближней локации, снабженном опять-таки "беспроводным" источником питания.
This was its second major showing after the launch at the Hanover Fair.
На столь крупном мероприятии это устройство демонстрировалось во второй раз после своего первого показа на Ганноверской торгово-промышленной ярмарке.
Advances in microelectronic device technology are also having a profound impact on the power electronics systems around which modern drive systems are built.
Достижения в области микроэлектроники оказывают также глубокое влияние на системы силовой электроники, лежащие в основе современных приводных устройств.
The ABB drive family ACS 800 is visible proof of this.
Наглядным тому доказательством может служить линейка блоков регулирования частоты вращения электродвигателей ACS-800, производство которой начато компанией АББ.
Combining advanced trench gate IGBT technology with efficient cooling and innovative design, this drive – for motors rated from 1.1 to 500 kW – has a footprint for some power ranges which is six times smaller than competing systems.
Предназначены они для двигателей мощностью от 1,1 до 500 кВт. В блоках применена новейшая разновидность приборов - биполярные транзисторы с изолированным желобковым затвором (trench gate IGBT) в сочетании с новыми конструктивными решениями, благодаря чему в отдельных диапазонах мощностей габариты блоков удалось снизить по сравнению с конкурирующими изделиями в шесть раз.
To get the maximum benefit out of this innovative drive solution we have also developed a new permanent magnet motor.
Стремясь с максимальной пользой использовать новые блоки регулирования, мы параллельно с ними разработали новый двигатель с постоянными магнитами.
It uses neodymium iron boron, a magnetic material which is more powerful at room temperature than any other known today.
В нем применен новый магнитный материал на основе неодима, железа и бора, характеристики которого при комнатной температуре на сегодняшний день не имеют себе равных.
The combination of new drive and new motor reduces losses by as much as 30%, lowering energy costs and improving sustainability – both urgently necessary – at the same time.
Совместное использование нового блока регулирования частоты вращения с новым двигателем снижает потери мощности до 30 %, что позволяет решить сразу две исключительно актуальные задачи:
сократить затраты на электроэнергию и повысить уровень безотказности.These innovations are utilized most fully, and yield the maximum benefit, when integrated by means of our Industrial IT architecture.
Потенциал перечисленных выше новых разработок используется в наиболее полной степени, а сами они приносят максимальную выгоду, если их интеграция осуществлена на основе нашей архитектуры IndustrialIT.
Industrial IT is a unique platform for exploiting the full potential of information technology in industrial applications.
IndustrialIT представляет собой уникальную платформу, позволяющую в максимальной степени использовать возможности информационных технологий применительно к задачам промышленности.
Consequently, our new products and technologies are Industrial IT Enabled, meaning that they can be integrated in the Industrial IT architecture in a ‘plug and produce’ manner.
Именно поэтому все наши новые изделия и технологии выпускаются в варианте, совместимом с архитектурой IndustrialIT, что означает их способность к интеграции с этой архитектурой по принципу "подключи и производи".
We are excited to present in this issue of ABB Review some of our R&D work and a selection of achievements in such a vital area of our business as Automation.
Мы рады представить в настоящем номере "АББ ревю" некоторые из наших научно-исследовательских разработок и достижений в такой жизненно важной для нашего бизнеса области, как автоматика.
R&D investment in our corporate technology programs is the foundation on which our product and system innovation is built.
Вклад наших разработок в общекорпоративные технологические программы группы АББ служит основой для реализации новых технических решений в создаваемых нами устройствах и системах.
Examples abound in the areas of control engineering, MEMS, wireless communication, materials – and, last but not least, software technologies. Enjoy reading about them.
[ABB Review]Это подтверждается многочисленными примерами из области техники управления, микроэлектромеханических систем, ближней радиосвязи, материаловедения и не в последнюю очередь программотехники. Хотелось бы пожелать читателю получить удовольствие от чтения этих материалов.
[Перевод Интент]
Тематики
EN
Англо-русский словарь нормативно-технической терминологии > automation technologies
17 clock synchronization
синхронизация времени
-
[ ГОСТ Р МЭК 60870-5-103-2005]Также нормированы допустимые временные задержки для различных видов сигналов, включая дискретные сигналы, оцифрованные мгновенные значения токов и напряжений, сигналы синхронизации времени и т.п.
[Новости Электротехники №4(76) | СТАНДАРТ МЭК 61850]Широковещательное сообщение, как правило, содержит адрес отправителя и глобальный адрес получателя. Примером широковещательного сообщения служит синхронизация времени.
[ ГОСТ Р 54325-2011 (IEC/TS 61850-2:2003)]Устройства последних поколений дают возможность синхронизации времени с точностью до микросекунд с помощью GPS.
С помощью этого интерфейса сигнал синхронизации времени (от радиоприемника DCF77 сигнал точного времени из Braunschweig, либо от радиоприемника iRiG-B сигнал точного времени глобальной спутниковой системы GPS) может быть передан в терминал для точной синхронизации времени.
[Герхард Циглер. ЦИФРОВАЯ ДИСТАНЦИОННАЯ ЗАЩИТА. ПРИНЦИПЫ И ПРИМЕНЕНИЕ
Перевод с английского ]В том случае если принятое сообщение искажено ( повреждено) в результате неисправности канала связи или в результате потери синхронизации времени, пользователь имеет возможность...
2.13 Синхронизация часов реального времени сигналом по оптовходу
В современных системах релейной защиты зачастую требуется синхронизированная работа часов всех реле в системе для восстановления хронологии работы разных реле.
Это может быть выполнено с использованием сигналов синхронизации времени по интерфейсу IRIG-B, если реле оснащено таким входом или сигналом от системы OP
[Дистанционная защита линии MiCOM P443/ ПРИНЦИП РАБОТЫ]
СИНХРОНИЗАЦИЯ ВРЕМЕНИ СОГЛАСНО СТАНДАРТУ IEEE 1588
Автор: Андреас Дреер (Hirschmann Automation and Control)
Вопрос синхронизации устройств по времени важен для многих распределенных систем промышленной автоматизации. При использовании протокола Precision Time Protocol (PTP), описанного стандартом IEEE 1588, становится возможным выполнение синхронизации внутренних часов устройств, объединенных по сети Ethernet, с погрешностями, не превышающими 1 микросекунду. При этом к вычислительной способности устройств и пропускной способности сети предъявляются относительно низкие требования. В 2008 году была утверждена вторая редакция стандарта (IEEE 1588-2008 – PTP версия 2) с рядом внесенных усовершенствований по сравнению с первой его редакцией.
ЗАЧЕМ НЕОБХОДИМА СИНХРОНИЗАЦИЯ УСТРОЙСТВ ПО ВРЕМЕНИ?
Во многих системах должен производиться отсчет времени. О неявной системе отсчета времени можно говорить тогда, когда в системе отсутствуют часы и ход времени определяется процессами, протекающими в аппаратном и программном обеспечении. Этого оказывается достаточно во многих случаях. Неявная система отсчета времени реализуется, к примеру, передачей сигналов, инициирующих начало отсчета времени и затем выполнение определенных действий, от одних устройств другим.
Система отсчета времени считается явной, если показания времени в ней определяются часами. Указанное необходимо для сложных систем. Таким образом, осуществляется разделение процедур передачи данных о времени и данных о процессе.
Два эффекта должны быть учтены при настройке или синхронизации часов в отдельных устройствах. Первое – показания часов в отдельных устройствах изначально отличаются друг от друга (смещение показаний времени друг относительно друга). Второе – реальные часы не производят отсчет времени с одинаковой скоростью. Таким образом, требуется проводить постоянную корректировку хода самых неточных часов.
Существуют различные способы синхронизации часов в составе отдельных устройств, объединенных в одну информационную сеть. Наиболее известные способы – это использование протокола NTP (Network Time Protocol), а также более простого протокола, который образован от него – протокола SNTP (Simple Network Time Protocol). Данные методы широко распространены для использования в локальных сетях и сети Интернет и позволяют обеспечивать синхронизацию времени с погрешностями в диапазоне миллисекунд. Другой вариант – использование радиосигналов с GPS спутников. Однако при использовании данного способа требуется наличие достаточно дорогих GPS-приемников для каждого из устройств, а также GPS-антенн. Данный способ теоретически может обеспечить высокую точность синхронизации времени, однако материальные затраты и трудозатраты обычно препятствуют реализации такого метода синхронизации.
Другим решением является передача высокоточного временного импульса (например, одного импульса в секунду) каждому отдельному устройству по выделенной линии. Реализация данного метода влечет за собой необходимость создания выделенной линии связи к каждому устройству.
Последним методом, который может быть использован, является протокол PTP (Precision Time Protocol), описанный стандартом IEEE 1588. Протокол был разработан со следующими целями:
- Обеспечение синхронизация времени с погрешностью, не превышающей 1 микросекунды.
-
Предъявление минимальных требований к производительности процессоров устройств и к пропускной способности линии связи, что позволило бы обеспечить реализацию протокола в простых и дешевых устройствах.
- Предъявление невысоких требований к обслуживающему персоналу.
- Возможность использования в сетях Ethernet, а также в других сетях.
- Спецификация его как международного стандарта.
ОБЛАСТИ ПРИМЕНЕНИЯ ПРОТОКОЛА PTP
Протокол PTP может быть применен в различного рода системах. В системах автоматизации, протокол PTP востребован везде, где требуется точная синхронизация устройств по времени. Протокол позволяет синхронизировать устройства в робототехнике или печатной промышленности, в системах осуществляющих обработку бумаги и упаковку продукции и других областях.
В общем и целом в любых системах, где осуществляется измерение тех или иных величин и их сравнение с величинами, измеренными другими устройствами, использование протокола PTP является популярным решением. Системы управления турбинами используют протокол PTP для обеспечения более эффективной работы станций. События, происходящие в различных частях распределенных в пространстве систем, определяются метками точного времени и затем для целей архивирования и анализа осуществляется их передача на центры управления. Геоученые используют протокол PTP для синхронизации установок мониторинга сейсмической активности, удаленных друг от друга на значительные расстояния, что предоставляет возможность более точным образом определять эпицентры землетрясений. В области телекоммуникаций рассматривают возможность использования протокола PTP для целей синхронизации сетей и базовых станций. Также синхронизация времени согласно стандарту IEEE 1588 представляет интерес для разработчиков систем обеспечения жизнедеятельности, систем передачи аудио и видео потоков и может быть использована в военной промышленности.
В электроэнергетике протокол PTPv2 (протокол PTP версии 2) определен для синхронизации интеллектуальных электронных устройств (IED) по времени. Например, при реализации шины процесса, с передачей мгновенных значений тока и напряжения согласно стандарту МЭК 61850-9-2, требуется точная синхронизация полевых устройств по времени. Для реализации систем защиты и автоматики с использованием сети Ethernet погрешность синхронизации данных различных устройств по времени должна лежать в микросекундном диапазоне.
Также для реализации функций синхронизированного распределенного векторного измерения электрических величин согласно стандарту IEEE C37.118, учета, оценки качества электрической энергии или анализа аварийных событий необходимо наличие устройств, синхронизированных по времени с максимальной точностью, для чего может быть использован протокол PTP.
Вторая редакция стандарта МЭК 61850 определяет использование в системах синхронизации времени протокола PTP. Детализация профиля протокола PTP для использования на объектах электроэнергетики (IEEE Standard Profile for Use of IEEE 1588 Precision Time Protocol in Power System Applications) в настоящее время осуществляется рабочей группой комитета по релейной защите и автоматике организации (PSRC) IEEE.
В 2005 году была начата работа по изменению стандарта IEEE1588-2002 с целью расширения возможных областей его применения (телекоммуникации, беспроводная связь и в др.). Результатом работы стало новое издание IEEE1588-2008, которое доступно с марта 2008 со следующими новыми особенностями:
- Усовершенствованные алгоритмы для обеспечения погрешностей в наносекундном диапазоне.
- Повышенное быстродействие синхронизации времени (возможна более частая передача сообщений синхронизации Sync).
- Поддержка новых типов сообщений.
- Ввод однорежимного принципа работы (не требуется передачи сообщений типа FollowUp).
- Ввод поддержки функции т.н. прозрачных часов для предотвращения накопления погрешностей измерения при каскадной схеме соединения коммутаторов.
- Ввод профилей, определяющих настройки для новых областей применения.
- Возможность назначения на такие транспортные механизмы как DeviceNet, PROFInet и IEEE802.3/Ethernet (прямое назначение).
- Ввод структуры TLV (тип, длина, значение) для расширения возможных областей применения стандарта и удовлетворения будущих потребностей.
- Ввод дополнительных опциональных расширений стандарта.
ПРИНЦИП ФУНКЦИОНИРОВАНИЯ СИСТЕМ НА ОСНОВЕ ПРОТОКОЛА PTP
В системах, где используется протокол PTP, различают два вида часов: ведущие часы и ведомые часы. Ведущие часы, в идеале, контролируются либо радиочасами, либо GPS-приемниками и осуществляют синхронизацию ведомых часов. Часы в конечном устройстве, неважно ведущие ли они или ведомые, считаются обычными часами; часы в составе устройств сети, выполняющих функцию передачи и маршрутизации данных (например, в Ethernet-коммутаторах), считаются граничными часами.
Процедура синхронизации согласно протоколу PTP подразделяется на два этапа. На первом этапе осуществляется коррекция разницы показаний времени между ведущими и ведомыми часами – то есть осуществляется так называемая коррекция смещения показаний времени. Для этого ведущее устройство осуществляет передачу сообщения для целей синхронизации времени Sync ведомому устройству (сообщение типа Sync). Сообщение содержит в себе текущее показание времени ведущих часов и его передача осуществляется периодически через фиксированные интервалы времени. Однако поскольку считывание показаний ведущих часов, обработка данных и передача через контроллер Ethernet занимает некоторое время, информация в передаваемом сообщении к моменту его приема оказывается неактуальной. Одновременно с этим осуществляется как можно более точная фиксация момента времени, в который сообщение Sync уходит от отправителя, в составе которого находятся ведущие часы (TM1). Затем ведущее устройство осуществляет передачу зафиксированного момента времени передачи сообщения Sync ведомым устройствам (сообщение FollowUp). Те также как можно точнее осуществляют измерение момента времени приема первого сообщения (TS1) и вычисляют величину, на которую необходимо выполнить коррекцию разницы в показаниях времени между собою и ведущим устройством соответственно (O) (см. рис. 1 и рис. 2). Затем непосредственно осуществляется коррекция показаний часов в составе ведомых устройств на величину смещения. Если задержки в передачи сообщений по сети не было, то можно утверждать, что устройства синхронизированы по времени.
На втором этапе процедуры синхронизации устройств по времени осуществляется определение задержки в передаче упомянутых выше сообщений по сети между устройствами. Указанное выполняется при использовании сообщений специального типа. Ведомое устройство отправляет так называемое сообщение Delay Request (Запрос задержки в передаче сообщения по сети) ведущему устройству и осуществляет фиксацию момента передачи данного сообщения. Ведущее устройство фиксирует момент приема данного сообщения и отправляет зафиксированное значение в сообщении Delay Response (Ответное сообщение с указанием момента приема сообщения). Исходя из зафиксированных времен передачи сообщения Delay Request ведомым устройством и приема сообщения Delay Response ведущим устройством производится оценка задержки в передачи сообщения между ними по сети. Затем производится соответствующая коррекция показаний часов в ведомом устройстве. Однако все упомянутое выше справедливо, если характерна симметричная задержка в передаче сообщения в обоих направлениях между устройствами (то есть характерны одинаковые значения в задержке передачи сообщений в обоих направлениях).
Задержка в передачи сообщения в обоих направлениях будет идентичной в том случае, если устройства соединены между собой по одной линии связи и только. Если в сети между устройствами имеются коммутаторы или маршрутизаторы, то симметричной задержка в передачи сообщения между устройствами не будет, поскольку коммутаторы в сети осуществляют сохранение тех пакетов данных, которые проходят через них, и реализуется определенная очередность их передачи. Эта особенность может, в некоторых случаях, значительным образом влиять на величину задержки в передаче сообщений (возможны значительные отличия во временах передачи данных). При низкой информационной загрузке сети этот эффект оказывает малое влияние, однако при высокой информационной загрузке, указанное может значительным образом повлиять на точность синхронизации времени. Для исключения больших погрешностей был предложен специальный метод и введено понятие граничных часов, которые реализуются в составе коммутаторов сети. Данные граничные часы синхронизируются по времени с часами ведущего устройства. Далее коммутатор по каждому порту является ведущим устройством для всех ведомых устройств, подключенных к его портам, в которых осуществляется соответствующая синхронизация часов. Таким образом, синхронизация всегда осуществляется по схеме точка-точка и характерна практически одинаковая задержка в передаче сообщения в прямом и обратном направлении, а также практическая неизменность этой задержки по величине от одной передачи сообщения к другой.
Хотя принцип, основанный на использовании граничных часов показал свою практическую эффективность, другой механизм был определен во второй версии протокола PTPv2 – механизм использования т. н. прозрачных часов. Данный механизм предотвращает накопление погрешности, обусловленной изменением величины задержек в передаче сообщений синхронизации коммутаторами и предотвращает снижение точности синхронизации в случае наличия сети с большим числом каскадно-соединенных коммутаторов. При использовании такого механизма передача сообщений синхронизации осуществляется от ведущего устройства ведомому, как и передача любого другого сообщения в сети. Однако когда сообщение синхронизации проходит через коммутатор фиксируется задержка его передачи коммутатором. Задержка фиксируется в специальном поле коррекции в составе первого сообщения синхронизации Sync или в составе последующего сообщения FollowUp (см. рис. 2). При передаче сообщений Delay Request и Delay Response также осуществляется фиксация времени задержки их в коммутаторе. Таким образом, реализация поддержки т. н. прозрачных часов в составе коммутаторов позволяет компенсировать задержки, возникающие непосредственно в них.
Если необходимо использование протокола PTP в системе, должен быть реализован стек протокола PTP. Это может быть сделано при предъявлении минимальных требований к производительности процессоров устройств и к пропускной способности сети. Это очень важно для реализации стека протокола в простых и дешевых устройствах. Протокол PTP может быть без труда реализован даже в системах, построенных на дешевых контроллерах (32 бита).
Единственное требование, которое необходимо удовлетворить для обеспечения высокой точности синхронизации, – как можно более точное измерение устройствами момента времени, в который осуществляется передача сообщения, и момента времени, когда осуществляется прием сообщения. Измерение должно производится максимально близко к аппаратной части (например, непосредственно в драйвере) и с максимально возможной точностью. В реализациях исключительно на программном уровне архитектура и производительность системы непосредственно ограничивают максимально допустимую точность.
При использовании дополнительной поддержки аппаратного обеспечения для присвоения меток времени, точность может быть значительным образом повышена и может быть обеспечена ее виртуальная независимость от программного обеспечения. Для этого необходимо использование дополнительной логики, которая может быть реализована в программируемой логической интегральной схеме или специализированной для решения конкретной задачи интегральной схеме на сетевом входе.
Компания Hirschmann – один из первых производителей, реализовавших протокол PTP и оптимизировавших его использование. Компанией был разработан стек, максимально эффективно реализующий протокол, а также чип (программируемая интегральная логическая схема), который обеспечивает высокую точность проводимых замеров.
В системе, в которой несколько обычных часов объединены через Ethernet-коммутатор с функцией граничных часов, была достигнута предельная погрешность +/- 60 нс при практически полной независимости от загрузки сети и загрузки процессора. Также компанией была протестирована система, состоящая из 30 каскадно-соединенных коммутаторов, обладающих функцией поддержки т.н. прозрачных часов и были зафиксированы погрешности менее в пределах +/- 200 нс.
Компания Hirschmann Automation and Control реализовала протоколы PTP версии 1 и версии 2 в промышленных коммутаторах серии MICE, а также в серии монтируемых на стойку коммутаторов MACH100.
Протокол PTP во многих областях уже доказал эффективность своего применения. Можно быть уверенным, что он получит более широкое распространение в течение следующих лет и что многие решения при его использовании смогут быть реализованы более просто и эффективно чем при использовании других технологий.
[ Источник]
Тематики
- релейная защита
- телемеханика, телеметрия
EN
синхронизация по тактам
тактовая синхронизация
—
[Л.Г.Суменко. Англо-русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.]Тематики
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > clock synchronization
18 time synchronization
синхронизация времени
-
[ ГОСТ Р МЭК 60870-5-103-2005]Также нормированы допустимые временные задержки для различных видов сигналов, включая дискретные сигналы, оцифрованные мгновенные значения токов и напряжений, сигналы синхронизации времени и т.п.
[Новости Электротехники №4(76) | СТАНДАРТ МЭК 61850]Широковещательное сообщение, как правило, содержит адрес отправителя и глобальный адрес получателя. Примером широковещательного сообщения служит синхронизация времени.
[ ГОСТ Р 54325-2011 (IEC/TS 61850-2:2003)]Устройства последних поколений дают возможность синхронизации времени с точностью до микросекунд с помощью GPS.
С помощью этого интерфейса сигнал синхронизации времени (от радиоприемника DCF77 сигнал точного времени из Braunschweig, либо от радиоприемника iRiG-B сигнал точного времени глобальной спутниковой системы GPS) может быть передан в терминал для точной синхронизации времени.
[Герхард Циглер. ЦИФРОВАЯ ДИСТАНЦИОННАЯ ЗАЩИТА. ПРИНЦИПЫ И ПРИМЕНЕНИЕ
Перевод с английского ]В том случае если принятое сообщение искажено ( повреждено) в результате неисправности канала связи или в результате потери синхронизации времени, пользователь имеет возможность...
2.13 Синхронизация часов реального времени сигналом по оптовходу
В современных системах релейной защиты зачастую требуется синхронизированная работа часов всех реле в системе для восстановления хронологии работы разных реле.
Это может быть выполнено с использованием сигналов синхронизации времени по интерфейсу IRIG-B, если реле оснащено таким входом или сигналом от системы OP
[Дистанционная защита линии MiCOM P443/ ПРИНЦИП РАБОТЫ]
СИНХРОНИЗАЦИЯ ВРЕМЕНИ СОГЛАСНО СТАНДАРТУ IEEE 1588
Автор: Андреас Дреер (Hirschmann Automation and Control)
Вопрос синхронизации устройств по времени важен для многих распределенных систем промышленной автоматизации. При использовании протокола Precision Time Protocol (PTP), описанного стандартом IEEE 1588, становится возможным выполнение синхронизации внутренних часов устройств, объединенных по сети Ethernet, с погрешностями, не превышающими 1 микросекунду. При этом к вычислительной способности устройств и пропускной способности сети предъявляются относительно низкие требования. В 2008 году была утверждена вторая редакция стандарта (IEEE 1588-2008 – PTP версия 2) с рядом внесенных усовершенствований по сравнению с первой его редакцией.
ЗАЧЕМ НЕОБХОДИМА СИНХРОНИЗАЦИЯ УСТРОЙСТВ ПО ВРЕМЕНИ?
Во многих системах должен производиться отсчет времени. О неявной системе отсчета времени можно говорить тогда, когда в системе отсутствуют часы и ход времени определяется процессами, протекающими в аппаратном и программном обеспечении. Этого оказывается достаточно во многих случаях. Неявная система отсчета времени реализуется, к примеру, передачей сигналов, инициирующих начало отсчета времени и затем выполнение определенных действий, от одних устройств другим.
Система отсчета времени считается явной, если показания времени в ней определяются часами. Указанное необходимо для сложных систем. Таким образом, осуществляется разделение процедур передачи данных о времени и данных о процессе.
Два эффекта должны быть учтены при настройке или синхронизации часов в отдельных устройствах. Первое – показания часов в отдельных устройствах изначально отличаются друг от друга (смещение показаний времени друг относительно друга). Второе – реальные часы не производят отсчет времени с одинаковой скоростью. Таким образом, требуется проводить постоянную корректировку хода самых неточных часов.
Существуют различные способы синхронизации часов в составе отдельных устройств, объединенных в одну информационную сеть. Наиболее известные способы – это использование протокола NTP (Network Time Protocol), а также более простого протокола, который образован от него – протокола SNTP (Simple Network Time Protocol). Данные методы широко распространены для использования в локальных сетях и сети Интернет и позволяют обеспечивать синхронизацию времени с погрешностями в диапазоне миллисекунд. Другой вариант – использование радиосигналов с GPS спутников. Однако при использовании данного способа требуется наличие достаточно дорогих GPS-приемников для каждого из устройств, а также GPS-антенн. Данный способ теоретически может обеспечить высокую точность синхронизации времени, однако материальные затраты и трудозатраты обычно препятствуют реализации такого метода синхронизации.
Другим решением является передача высокоточного временного импульса (например, одного импульса в секунду) каждому отдельному устройству по выделенной линии. Реализация данного метода влечет за собой необходимость создания выделенной линии связи к каждому устройству.
Последним методом, который может быть использован, является протокол PTP (Precision Time Protocol), описанный стандартом IEEE 1588. Протокол был разработан со следующими целями:
- Обеспечение синхронизация времени с погрешностью, не превышающей 1 микросекунды.
-
Предъявление минимальных требований к производительности процессоров устройств и к пропускной способности линии связи, что позволило бы обеспечить реализацию протокола в простых и дешевых устройствах.
- Предъявление невысоких требований к обслуживающему персоналу.
- Возможность использования в сетях Ethernet, а также в других сетях.
- Спецификация его как международного стандарта.
ОБЛАСТИ ПРИМЕНЕНИЯ ПРОТОКОЛА PTP
Протокол PTP может быть применен в различного рода системах. В системах автоматизации, протокол PTP востребован везде, где требуется точная синхронизация устройств по времени. Протокол позволяет синхронизировать устройства в робототехнике или печатной промышленности, в системах осуществляющих обработку бумаги и упаковку продукции и других областях.
В общем и целом в любых системах, где осуществляется измерение тех или иных величин и их сравнение с величинами, измеренными другими устройствами, использование протокола PTP является популярным решением. Системы управления турбинами используют протокол PTP для обеспечения более эффективной работы станций. События, происходящие в различных частях распределенных в пространстве систем, определяются метками точного времени и затем для целей архивирования и анализа осуществляется их передача на центры управления. Геоученые используют протокол PTP для синхронизации установок мониторинга сейсмической активности, удаленных друг от друга на значительные расстояния, что предоставляет возможность более точным образом определять эпицентры землетрясений. В области телекоммуникаций рассматривают возможность использования протокола PTP для целей синхронизации сетей и базовых станций. Также синхронизация времени согласно стандарту IEEE 1588 представляет интерес для разработчиков систем обеспечения жизнедеятельности, систем передачи аудио и видео потоков и может быть использована в военной промышленности.
В электроэнергетике протокол PTPv2 (протокол PTP версии 2) определен для синхронизации интеллектуальных электронных устройств (IED) по времени. Например, при реализации шины процесса, с передачей мгновенных значений тока и напряжения согласно стандарту МЭК 61850-9-2, требуется точная синхронизация полевых устройств по времени. Для реализации систем защиты и автоматики с использованием сети Ethernet погрешность синхронизации данных различных устройств по времени должна лежать в микросекундном диапазоне.
Также для реализации функций синхронизированного распределенного векторного измерения электрических величин согласно стандарту IEEE C37.118, учета, оценки качества электрической энергии или анализа аварийных событий необходимо наличие устройств, синхронизированных по времени с максимальной точностью, для чего может быть использован протокол PTP.
Вторая редакция стандарта МЭК 61850 определяет использование в системах синхронизации времени протокола PTP. Детализация профиля протокола PTP для использования на объектах электроэнергетики (IEEE Standard Profile for Use of IEEE 1588 Precision Time Protocol in Power System Applications) в настоящее время осуществляется рабочей группой комитета по релейной защите и автоматике организации (PSRC) IEEE.
В 2005 году была начата работа по изменению стандарта IEEE1588-2002 с целью расширения возможных областей его применения (телекоммуникации, беспроводная связь и в др.). Результатом работы стало новое издание IEEE1588-2008, которое доступно с марта 2008 со следующими новыми особенностями:
- Усовершенствованные алгоритмы для обеспечения погрешностей в наносекундном диапазоне.
- Повышенное быстродействие синхронизации времени (возможна более частая передача сообщений синхронизации Sync).
- Поддержка новых типов сообщений.
- Ввод однорежимного принципа работы (не требуется передачи сообщений типа FollowUp).
- Ввод поддержки функции т.н. прозрачных часов для предотвращения накопления погрешностей измерения при каскадной схеме соединения коммутаторов.
- Ввод профилей, определяющих настройки для новых областей применения.
- Возможность назначения на такие транспортные механизмы как DeviceNet, PROFInet и IEEE802.3/Ethernet (прямое назначение).
- Ввод структуры TLV (тип, длина, значение) для расширения возможных областей применения стандарта и удовлетворения будущих потребностей.
- Ввод дополнительных опциональных расширений стандарта.
ПРИНЦИП ФУНКЦИОНИРОВАНИЯ СИСТЕМ НА ОСНОВЕ ПРОТОКОЛА PTP
В системах, где используется протокол PTP, различают два вида часов: ведущие часы и ведомые часы. Ведущие часы, в идеале, контролируются либо радиочасами, либо GPS-приемниками и осуществляют синхронизацию ведомых часов. Часы в конечном устройстве, неважно ведущие ли они или ведомые, считаются обычными часами; часы в составе устройств сети, выполняющих функцию передачи и маршрутизации данных (например, в Ethernet-коммутаторах), считаются граничными часами.
Процедура синхронизации согласно протоколу PTP подразделяется на два этапа. На первом этапе осуществляется коррекция разницы показаний времени между ведущими и ведомыми часами – то есть осуществляется так называемая коррекция смещения показаний времени. Для этого ведущее устройство осуществляет передачу сообщения для целей синхронизации времени Sync ведомому устройству (сообщение типа Sync). Сообщение содержит в себе текущее показание времени ведущих часов и его передача осуществляется периодически через фиксированные интервалы времени. Однако поскольку считывание показаний ведущих часов, обработка данных и передача через контроллер Ethernet занимает некоторое время, информация в передаваемом сообщении к моменту его приема оказывается неактуальной. Одновременно с этим осуществляется как можно более точная фиксация момента времени, в который сообщение Sync уходит от отправителя, в составе которого находятся ведущие часы (TM1). Затем ведущее устройство осуществляет передачу зафиксированного момента времени передачи сообщения Sync ведомым устройствам (сообщение FollowUp). Те также как можно точнее осуществляют измерение момента времени приема первого сообщения (TS1) и вычисляют величину, на которую необходимо выполнить коррекцию разницы в показаниях времени между собою и ведущим устройством соответственно (O) (см. рис. 1 и рис. 2). Затем непосредственно осуществляется коррекция показаний часов в составе ведомых устройств на величину смещения. Если задержки в передачи сообщений по сети не было, то можно утверждать, что устройства синхронизированы по времени.
На втором этапе процедуры синхронизации устройств по времени осуществляется определение задержки в передаче упомянутых выше сообщений по сети между устройствами. Указанное выполняется при использовании сообщений специального типа. Ведомое устройство отправляет так называемое сообщение Delay Request (Запрос задержки в передаче сообщения по сети) ведущему устройству и осуществляет фиксацию момента передачи данного сообщения. Ведущее устройство фиксирует момент приема данного сообщения и отправляет зафиксированное значение в сообщении Delay Response (Ответное сообщение с указанием момента приема сообщения). Исходя из зафиксированных времен передачи сообщения Delay Request ведомым устройством и приема сообщения Delay Response ведущим устройством производится оценка задержки в передачи сообщения между ними по сети. Затем производится соответствующая коррекция показаний часов в ведомом устройстве. Однако все упомянутое выше справедливо, если характерна симметричная задержка в передаче сообщения в обоих направлениях между устройствами (то есть характерны одинаковые значения в задержке передачи сообщений в обоих направлениях).
Задержка в передачи сообщения в обоих направлениях будет идентичной в том случае, если устройства соединены между собой по одной линии связи и только. Если в сети между устройствами имеются коммутаторы или маршрутизаторы, то симметричной задержка в передачи сообщения между устройствами не будет, поскольку коммутаторы в сети осуществляют сохранение тех пакетов данных, которые проходят через них, и реализуется определенная очередность их передачи. Эта особенность может, в некоторых случаях, значительным образом влиять на величину задержки в передаче сообщений (возможны значительные отличия во временах передачи данных). При низкой информационной загрузке сети этот эффект оказывает малое влияние, однако при высокой информационной загрузке, указанное может значительным образом повлиять на точность синхронизации времени. Для исключения больших погрешностей был предложен специальный метод и введено понятие граничных часов, которые реализуются в составе коммутаторов сети. Данные граничные часы синхронизируются по времени с часами ведущего устройства. Далее коммутатор по каждому порту является ведущим устройством для всех ведомых устройств, подключенных к его портам, в которых осуществляется соответствующая синхронизация часов. Таким образом, синхронизация всегда осуществляется по схеме точка-точка и характерна практически одинаковая задержка в передаче сообщения в прямом и обратном направлении, а также практическая неизменность этой задержки по величине от одной передачи сообщения к другой.
Хотя принцип, основанный на использовании граничных часов показал свою практическую эффективность, другой механизм был определен во второй версии протокола PTPv2 – механизм использования т. н. прозрачных часов. Данный механизм предотвращает накопление погрешности, обусловленной изменением величины задержек в передаче сообщений синхронизации коммутаторами и предотвращает снижение точности синхронизации в случае наличия сети с большим числом каскадно-соединенных коммутаторов. При использовании такого механизма передача сообщений синхронизации осуществляется от ведущего устройства ведомому, как и передача любого другого сообщения в сети. Однако когда сообщение синхронизации проходит через коммутатор фиксируется задержка его передачи коммутатором. Задержка фиксируется в специальном поле коррекции в составе первого сообщения синхронизации Sync или в составе последующего сообщения FollowUp (см. рис. 2). При передаче сообщений Delay Request и Delay Response также осуществляется фиксация времени задержки их в коммутаторе. Таким образом, реализация поддержки т. н. прозрачных часов в составе коммутаторов позволяет компенсировать задержки, возникающие непосредственно в них.
Если необходимо использование протокола PTP в системе, должен быть реализован стек протокола PTP. Это может быть сделано при предъявлении минимальных требований к производительности процессоров устройств и к пропускной способности сети. Это очень важно для реализации стека протокола в простых и дешевых устройствах. Протокол PTP может быть без труда реализован даже в системах, построенных на дешевых контроллерах (32 бита).
Единственное требование, которое необходимо удовлетворить для обеспечения высокой точности синхронизации, – как можно более точное измерение устройствами момента времени, в который осуществляется передача сообщения, и момента времени, когда осуществляется прием сообщения. Измерение должно производится максимально близко к аппаратной части (например, непосредственно в драйвере) и с максимально возможной точностью. В реализациях исключительно на программном уровне архитектура и производительность системы непосредственно ограничивают максимально допустимую точность.
При использовании дополнительной поддержки аппаратного обеспечения для присвоения меток времени, точность может быть значительным образом повышена и может быть обеспечена ее виртуальная независимость от программного обеспечения. Для этого необходимо использование дополнительной логики, которая может быть реализована в программируемой логической интегральной схеме или специализированной для решения конкретной задачи интегральной схеме на сетевом входе.
Компания Hirschmann – один из первых производителей, реализовавших протокол PTP и оптимизировавших его использование. Компанией был разработан стек, максимально эффективно реализующий протокол, а также чип (программируемая интегральная логическая схема), который обеспечивает высокую точность проводимых замеров.
В системе, в которой несколько обычных часов объединены через Ethernet-коммутатор с функцией граничных часов, была достигнута предельная погрешность +/- 60 нс при практически полной независимости от загрузки сети и загрузки процессора. Также компанией была протестирована система, состоящая из 30 каскадно-соединенных коммутаторов, обладающих функцией поддержки т.н. прозрачных часов и были зафиксированы погрешности менее в пределах +/- 200 нс.
Компания Hirschmann Automation and Control реализовала протоколы PTP версии 1 и версии 2 в промышленных коммутаторах серии MICE, а также в серии монтируемых на стойку коммутаторов MACH100.
Протокол PTP во многих областях уже доказал эффективность своего применения. Можно быть уверенным, что он получит более широкое распространение в течение следующих лет и что многие решения при его использовании смогут быть реализованы более просто и эффективно чем при использовании других технологий.
[ Источник]
Тематики
- релейная защита
- телемеханика, телеметрия
EN
Англо-русский словарь нормативно-технической терминологии > time synchronization
19 ETR
- ядерный реактор для технических испытаний
- упреждающее освобождение маркера
- снижение тарифов на электроэнергию
- рекомендации по связи в Европе
- поверхностная акустическая волна
- легкодоступный
легкодоступный
—
[Л.Г.Суменко. Англо-русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.]Тематики
EN
рекомендации по связи в Европе
Название серии документов, дополняющих стандарты, разработанные ETSI. Спецификации, приведенные в документе ETR, не обязательны при реализации оборудования соответствующего стандарта.
[Л.М. Невдяев. Телекоммуникационные технологии. Англо-русский толковый словарь-справочник. Под редакцией Ю.М. Горностаева. Москва, 2002]Тематики
- электросвязь, основные понятия
EN
снижение тарифов на электроэнергию
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
упреждающее освобождение маркера
Механизм, используемый в сетях Token Ring (16 Мбит/с), в рамках которого передающая станция присоединяет свободный маркер к своему сообщению, обеспечивая доступность маркера до того, как он обойдет кольцо полностью.
[ http://www.lexikon.ru/dict/net/index.html]Тематики
EN
ядерный реактор для технических испытаний
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
06.04.13 поверхностная акустическая волна [ surface acoustic wave; SAW]: Электроакустический эффект, используемый в системах автоматической идентификации, когда микроволновые радиосигналы малой мощности с помощью пьезоэлектрического кристалла в радиочастотной метке преобразуются в ультразвуковые поверхностные акустические волны.
Примечание - Информация об уникальной идентификации содержится в фазово-временных вариациях отраженного радиочастотной меткой сигнала.
<2>4 Сокращения
ARQ
Автоматический запрос повтора [Automatic Repeat Request]
ASK
Амплитудная манипуляция [Amplitude Shift Keying]
BPSK
Бинарная фазовая манипуляция [Binary Phase Shift Keying]
CDMA
Множественный доступ с кодовым разделением каналов [Code Division Multiple Access]
CSMA
Множественный доступ с анализом состояния канала передачи данных [Carrier Sense Multiple Access]
CSMA/CD
Множественный доступ с анализом состояния канала передачи данных и обнаружением конфликтов [Carrier Sense Multiple Access with Collision Detection]
DBPSK
Дифференциальная бинарная фазовая манипуляция [Differential binary phase shift keying]
DSSS
Широкополосная модуляция с непосредственной передачей псевдослучайной последовательности [Direct sequence spread spectrum modulation]
EIRP (ЭИИМ)
Эквивалентная изотропно-излучаемая мощность [Equivalent Isotropically Radiated Power]
EMI
Электромагнитная помеха [ElectroMagnetic Interference]
ETR
Технический отчет ETSI [European Telecommunications Report]
ETS
Телекоммуникационный стандарт ETSI [European Telecommunications Standard]
ETSI
Европейский институт по стандартизации в области телекоммуникаций [European Telecommunications Standards Institute]
FHSS
Широкополосная модуляция с дискретной перестройкой несущей частоты [Frequency Hopping Spread Spectrum]
FSK
Частотная манипуляция [Frequency Shift Keying]
GHz (ГГц)
Гигагерц [Gigahertz]
GMSK
Минимальная гауссовская манипуляция [Gaussian Minimum Shift Keying]
kHz (кГц)
Килогерц [Kilohertz]
MSK
Минимальнофазовая частотная манипуляция [Minimum shift keying]
MHz (МГц)
Мегагерц [Megahertz]
OBE
Навесное оборудование [On-Board Equipment]
PDM
Модуляция импульса по длительности, широтно-импульсная модуляция [Pulse Duration Modulation]
PM
Фазовая модуляция [Phase modulation]
PPM (ФИМ)
Фазоимпульсная модуляция [Modulation (pulse position)]
PSK
Фазовая манипуляция [Phase Shift Keying]
PWM
Широтно-импульсная модуляция [Pulse Width Modulation]
RF/DC
Обмен данными системы радиочастотной идентификации [Radio frequency data communication]
RFI
Радиопомеха [Radio frequency interference]
RSSI
Индикатор уровня принимаемого сигнала [Receiving Signal Strength Indicator]
S/N
Отношение сигнала к шуму [Signal/noise ratio]
SAW
Поверхностная акустическая волна [Surface Acoustic Wave]
SIN AD
Отношение сигнала к шуму и искажению [Signal to Noise & Distortion]
SRD
Устройство малого радиуса действия [Short Range Device]
TBR
Технические основы регулирования [Technical Basis for Regulation]
TDD
Дуплексная связь с временным разделением каналов [Time Division Duplexing]
TDM
Временное разделение каналов [Time Division Multiplexing]
<2>Библиография
[1]
МЭК 60050-713
(IEC 60050-713)
Международный электротехнический словарь. Часть 713. Радиосвязь: приемники, передатчики, сети и их режим работы
( International Electrotechnical Vocabulary - Part 713: Radiocommunications: transmitters, receivers, networks and operation)
[2]
МЭК 60050-705
(IEC 60050-705)
Международный электротехнический словарь. Глава 705: Распространение радиоволн ( International Electrotechnical Vocabulary - Chapter 705: Radio wave propagation)
[3]
МЭК 60050-702
(IEC 60050-702)
Международный электротехнический словарь. Глава 702: Колебания, сигналы и соответствующие устройства
( International Electrotechnical Vocabulary - Chapter 702: Oscillations, signals and related devices)
[4]
МЭК 60050-121
(IEC 60050-121)
Международный электротехнический словарь. Глава 121: Электромагнетизм ( International Electrotechnical Vocabulary - Part 121: Electromagnetism)
[5]
МЭК 60050-712
(IEC 60050-712)
Международный электротехнический словарь. Глава 712: Антенны ( International Electrotechnical Vocabulary - Chapter 712: Antennas)
[6]
МЭК 60050-221
(IEC 60050-221)
Международный электротехнический словарь. Глава 221: Магнитные материалы и компоненты
( International Electrotechnical Vocabulary - Chapter 221: Magnetic materials and components)
[7]
ИСО/МЭК 2382-9:1995
(ISO/IEC2382-9:1995)
Информационная технология. Словарь. Часть 9. Обмен данными ( Information technology - Vocabulary - Part 9: Data communication)
[8]
МЭК 60050-725
(IEC 60050-725)
Международный электротехнический словарь. Глава 725: Космическая радиосвязь ( International Electrotechnical Vocabulary - Chapter 725: Space radiocommunications)
[9]
МЭК 60050-714
(IEC 60050-714)
Международный электротехнический словарь. Глава 714: Коммутация и сигнализация в электросвязи
( International Electrotechnical Vocabulary - Chapter 714: Switching and signalling in telecommunications)
[10]
МЭК 60050-704
(IEC 60050-704)
Международный Электротехнический словарь. Глава 704. Техника передачи ( International Electrotechnical Vocabulary - Chapter 704: Transmission)
[11]
МЭК 60050-161
(IEC 60050-161)
Международный электротехнический словарь. Глава 161: Электромагнитная совместимость ( International Electrotechnical Vocabulary. Chapter 161: Electromagnetic compatibility)
[12]
ИСО/МЭК 8824-1
(ISO/IEC 8824-1)
Информационные технологии. Абстрактная синтаксическая нотация версии один
(АСН.1). Часть 1. Спецификация основной нотации
(Information technology - Abstract Syntax Notation One (ASN.1): Specification of basic notation)1)
[13]
ИСО/МЭК 9834-1
(ISO/IEC 9834-1)
Информационные технологии. Взаимосвязь открытых систем. Процедуры действий уполномоченных по регистрации ВОС. Часть 1. Общие процедуры и верхние дуги дерева идентификатора объекта АСН.1
( Information technology - Open Systems Interconnection - Procedures for the operation of OSI Registration Authorities: General procedures and top arcs of the ASN. 1 Object Identifier tree)
[14]
ИСО/МЭК 15962]
(ISO/IEC 15962)
Информационные технологии. Радиочастотная идентификация (RFID) для управления предметами. Протокол данных: правила кодирования данных и функции логической памяти
( Information technology - Radio frequency identification ( RFID) for item management - Data protocol: data encoding rules and logical memory functions)
[15]
ИСО/МЭК 19762-1
(ISO/IEC 19762-1)
Информационные технологии. Технологии автоматической идентификации и сбора данных (АИСД). Гармонизированный словарь. Часть 1. Общие термины в области АIDC ( Information technology - Automatic identification and data capture ( AIDC) techniques - Harmonized vocabulary - Part 1: General terms relating to AIDC)
[16]
ИСО/МЭК 19762-2
(ISO/IEC 19762-2)
Информационные технологии. Технологии автоматической идентификации и сбора данных (АИСД). Гармонизированный словарь. Часть 2. Оптические носители данных (ОНД)
( Information technology - Automatic identification and data capture ( AIDC) techniques - Harmonized vocabulary - Part 2: Optically readable media ( ORM))
[17]
ИСО/МЭК 19762-3
(ISO/IEC 19762-3)
Информационные технологии. Технологии автоматической идентификации и сбора данных (АИСД). Гармонизированный словарь. Часть 3. Радиочастотная идентификация (РЧИ)
( Information technology - Automatic identification and data capture ( AIDC) techniques - Harmonized vocabulary - Part 3: Radio frequency identification ( RFID))
[18]
ИСО/МЭК 19762-5
(ISO/IEC 19762-5)
Информационные технологии. Технологии автоматической идентификации и сбора данных (АИСД). Гармонизированный словарь. Часть 5. Системы определения места нахождения
( Information technology - Automatic identification and data capture ( AIDC) techniques - Harmonized vocabulary - Part 5: Locating systems)
[19]
ИСО/МЭК 18000-6
(ISO/IEC 18000-6)
Информационные технологии. Радиочастотная идентификация для управления предметами. Часть 6. Параметры радиоинтерфейса для диапазона частот 860 - 960 МГц ( Information technology - Radio frequency identification for item management - Part 6: Parameters for air interface communications at 860 MHz to 960 MHz)
_____________
1)В оригинале ИСО/МЭК 19762-4 стандарты [12] - [19] включены в раздел «Библиография», однако следует учитывать, что в основном тексте стандарта ссылок на них нет.
<2>
Источник: ГОСТ Р ИСО/МЭК 19762-4-2011: Информационные технологии. Технологии автоматической идентификации и сбора данных (АИСД). Гармонизированный словарь. Часть 4. Общие термины в области радиосвязи оригинал документа
Англо-русский словарь нормативно-технической терминологии > ETR
20 quality of service
- показатель качества обслуживания
- класс обслуживания
- качество эксплуатации
- качество телекоммуникационной услуги
- качество сервиса (ВОС)
- качество обслуживания (в информационных технологиях)
- качество обслуживания
качество обслуживания
Комплексная характеристика степени удовлетворения пользователя предоставляемыми услугами.
[Руководящий документ "Основные положения развития Взаимоувязанной сети связи Российской Федерации на перспективу до 2005 года"]
качество обслуживания
Совокупность характеристик процесса и условий обслуживания, обеспечивающих удовлетворение установленных или предполагаемых потребностей потребителя.
[ ГОСТ Р 50646-94]Тематики
- услуги населению
- электросвязь, основные понятия
Обобщающие термины
EN
качество обслуживания
Стандарт QoS — это ряд мер, призванных обеспечить определенный уровень качества конкретного ресурса для указанного трафика в сети. Качество определяется, например, поддерживаемым уровнем пропускной способности сети, низким уровнем задержки, отсутствием случаев потери пакетов и т. д. Стандарт QoS в отношении продукции компании Axis для сетевого видеонаблюдения определяет пакеты данных для различных типов сетевого трафика исходя из характеристик конкретного устройства. Это позволяет сетевым маршрутизаторам и коммутаторам резервировать определенный объем полосы пропускания для используемого типа трафика.
[ http://www.alltso.ru/publ/glossarij_setevoe_videonabljudenie_terminy/1-1-0-34]
качество обслуживания
качество и класс предоставляемых услуг передачи данных
QoS обычно описывает сеть в терминах задержки, полосы и дрожи сигнала [http://www.citforum.ru/nets/glossary/_terms.shtml].
Рекомендация МСЭ Y.1541 определяет значения параметров, которые должны обеспечиваться в сетях IP на международных трактах, соединяющих терминалы пользователей. Нормативы разделены по "классам обслуживания" (QoS).Классы качества обслуживания (QoS)
0
1
2
3
4
5
Задержка доставки пакета IP, IPTD
100 мс
400 мс
100 мс
400 мс
1с
--
Вариация задержки пакета IP, IPDV (джиттер
50 мс
50 мс
--
--
--
--
Коэффициент потери пакетов IP, IPLR
1E-3
1E-3
1E-3
1E-3
1E-3
--
Коэффициент ошибок пакетов IP, IPER
1E-4
1E-4
1E-4
1E-4
1E-4
--
В таблице приведены верхние границы для средних значений параметров. Также в Рекомендации Y.1541 представлены спецификации набора параметров, которые связаны с измерением реальных значений сетевых характеристик: периода наблюдений, длины тестовых пакетов, их числа. Например, при оценке качества передачи пакетов речи в IP-телефонии минимальный интервал наблюдения должен быть порядка 1-20 секунд при типовой скорости передачи 50 пакетов в секунду. Рекомендуемый интервал измерений для задержки, джиттера и потерь, должен составлять не менее 60 секунд.
Рекомендация также устанавливает соответствие между классами качества обслуживания и приложениями:
Класс 0. Приложения реального времени, чувствительные к джиттеру, характеризуемые высоким уровнем интерактивности (VoIP, видеоконференции).
Класс 1. Приложения реального времени, чувствительные к джиттеру, интерактивные приложения (VoIP, видеоконференции)
Класс 2. Транзакции данных, характеризуемые высоким уровнем интерактивности, например, сигнализация
Класс 3. Транзакции данных, интерактивные.
Класс 4. Приложения, допускающие низкий уровень потерь (короткие транзакции, массивы данных, потоковое видео)
Класс 5. Традиционные применения сетей IP.
[www.mforum.ru ]
[ http://www.morepc.ru/dict/]
Тематики
Синонимы
EN
качество сервиса (ВОС)
Совокупность характеристик сервиса уровня, наблюдаемых между оконечными точками соединения.
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]Тематики
EN
качество телекоммуникационной услуги
Совокупность специфических показателей, характеризующих потребительские свойства телекоммуникационной услуги и определяющие ее способность удовлетворить установленные и заказанные потребности потребителя услуг.
[ http://navtel.uz/uzb/termin.html]Тематики
- электросвязь, основные понятия
EN
качество эксплуатации
качество технического обслуживания
—
[ http://slovarionline.ru/anglo_russkiy_slovar_neftegazovoy_promyishlennosti/]Тематики
Синонимы
EN
показатель качества обслуживания
Гарантированный показатель качества, определяющий тип трафика и его основные вероятностно-временные характеристики: допустимую задержку в обслуживании, достоверность передачи информации, вероятность отказа в обслуживании и др.
[Л.М.Невдяев. Мобильная связь 3-го поколения. Москва, 2000 г.]Тематики
EN
Англо-русский словарь нормативно-технической терминологии > quality of service
СтраницыСм. также в других словарях:
стандарт — стандарт: Официальное издание, содержащее комплекс норм, правил, требований к объекту стандартизации, которые устанавливают на основе достижений науки, техники и передового опыта и утверждают в соответствии с действующим законодательством.… … Словарь-справочник терминов нормативно-технической документации
Стандарт STEP — STEP STandard for Exchange of Product model data (стандарт обмена данными модели изделия). Примерно в конце 1970 х годов возникла идея о том, что необходима определенная стандартизация в области обмена данными, поскольку появилось много систем… … Википедия
СТАНДАРТ ОБРАЗОВАНИЯ — СТАНДАРТ ОБРАЗОВАНИЯ. Система основных параметров, принимаемых в качестве государственной нормы образованности. Основными единицами С. о. являются его структура, содержание, объем учебной нагрузки, уровень подготовки учащихся. Нормы и требования … Новый словарь методических терминов и понятий (теория и практика обучения языкам)
СТО 70238424.17.220.20.005-2011: Системы связи для сбора и передачи информации в электроэнергетике. Условия создания. Нормы и требования — Терминология СТО 70238424.17.220.20.005 2011: Системы связи для сбора и передачи информации в электроэнергетике. Условия создания. Нормы и требования: 3.1.3 заградитель высокочастотный : Устройство, обеспечивающее возможность работы ВЧ канала по… … Словарь-справочник терминов нормативно-технической документации
Министерство связи и массовых коммуникаций Российской Федерации — У этого термина существуют и другие значения, см. Министерство связи. Министерство связи и массовых коммуникаций Российской Федерации (Минкомсвязь России) Малая эмблема Министерства[1] … Википедия
Министерство связи и информатизации Беларуси — У этого термина существуют и другие значения, см. Министерство связи. Министерство связи и информатизации Республики Беларусь (Минсвязи Республики Беларусь) белор. Міністэрства сувязі і інфарматызацыі Рэспублікі Беларусь Общая информация Дата… … Википедия
Министерство связи Израиля — У этого термина существуют и другие значения, см. Министерство связи. Министерство связи Израиля ивр. משרד התקשורת Общая информация Дата создания 1970 Предшествующее ведомство Министерство почты Израиля (1952 1970) Руководство деятельностью… … Википедия
Федеральное агентство связи — У этого термина существуют и другие значения, см. Фас (значения). Федеральное агентство связи (Россвязь) Эмблема Россвязи … Википедия
ГОСТ Р ИСО/МЭК 19762-1-2011: Информационные технологии. Технологии автоматической идентификации и сбора данных (АИСД). Гармонизированный словарь. Часть 1. Общие термины в области АИСД — Терминология ГОСТ Р ИСО/МЭК 19762 1 2011: Информационные технологии. Технологии автоматической идентификации и сбора данных (АИСД). Гармонизированный словарь. Часть 1. Общие термины в области АИСД оригинал документа: Accredited Standards… … Словарь-справочник терминов нормативно-технической документации
Золотой стандарт — (Gold standard) Золотой стандарт это денежная система, в рамках которой наличные деньги могут быть свободно обменены на золото Введение и последовательность развития форм золотого стандарта, сущность и виды золотого стандарта, существование… … Энциклопедия инвестора
ГОСТ Р ИСО/МЭК 19762-4-2011: Информационные технологии. Технологии автоматической идентификации и сбора данных (АИСД). Гармонизированный словарь. Часть 4. Общие термины в области радиосвязи — Терминология ГОСТ Р ИСО/МЭК 19762 4 2011: Информационные технологии. Технологии автоматической идентификации и сбора данных (АИСД). Гармонизированный словарь. Часть 4. Общие термины в области радиосвязи оригинал документа: ALOHA [ALOHA slotted]:… … Словарь-справочник терминов нормативно-технической документации
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.
Перевод: со всех языков на русский
с русского на все языки- С русского на:
- Все языки
- Со всех языков на:
- Все языки
- Английский
- Немецкий
- Русский
- Французский